In this guide, we shall see how to interface MPU6050 with STM32F4xx.
In this guide, we shall cover the following:
- What is MPU6050.
- Connection.
- Developing the driver.
- Code.
- Results.
1. What is MPU6050:
The MPU-6050™ parts are the world’s first MotionTracking devices designed for the low power, low cost, and high-performance requirements of smartphones, tablets and wearable sensors.
The MPU-6050 incorporates InvenSense’s MotionFusion™ and run-time calibration firmware that enables manufacturers to eliminate the costly and complex selection, qualification, and system level integration of discrete devices in motion-enabled products, guaranteeing that sensor fusion algorithms and calibration procedures deliver optimal performance for consumers.
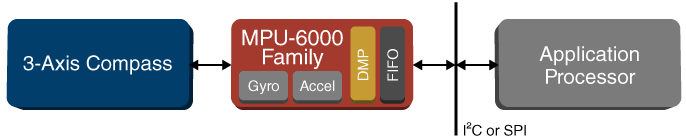
The MPU-6050 devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon die, together with an onboard Digital Motion Processor™ (DMP™), which processes complex 6-axis MotionFusion algorithms. The device can access external magnetometers or other sensors through an auxiliary master I²C bus, allowing the devices to gather a full set of sensor data without intervention from the system processor. The devices are offered in a 4 mm x 4 mm x 0.9 mm QFN package.
The InvenSense MotionApps™ Platform that comes with the MPU-6050 abstracts motion-based complexities, offloads sensor management from the operating system, and provides a structured set of APIs for application development.
For precision tracking of both fast and slow motions, the parts feature a user-programmable gyro full-scale range of ±250, ±500, ±1000, and ±2000 °/sec (dps), and a user-programmable accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g. Additional features include an embedded temperature sensor and an on-chip oscillator with ±1% variation over the operating temperature range.
Applications
- BlurFree™ technology (for Video/Still Image Stabilization)
- AirSign™ technology (for Security/Authentication)
- TouchAnywhere™ technology (for “no touch” UI Application Control/Navigation)
- MotionCommand™ technology (for Gesture Short-cuts)
- Motion-enabled game and application framework
- InstantGesture™ iG™ gesture recognition
- Location based services, points of interest, and dead reckoning
- Handset and portable gaming
- Motion-based game controllers
- 3D remote controls for Internet connected DTVs and set top boxes, 3D mice
- Wearable sensors for health, fitness and sports
- Toys
Features:
Gyroscope Features:
The triple-axis MEMS gyroscope in the MPU-60X0 includes a wide range of features:
- Digital-output X-, Y-, and Z-Axis angular rate sensors (gyroscopes) with a user-programmable full-scale range of ±250, ±500, ±1000, and ±2000°/sec
- External sync signal connected to the FSYNC pin supports image, video and GPS synchronization
- Integrated 16-bit ADCs enable simultaneous sampling of gyros
- Enhanced bias and sensitivity temperature stability reduces the need for user calibration
- Improved low-frequency noise performance
- Digitally-programmable low-pass filter
- Gyroscope operating current: 3.6mA
- Standby current: 5µA
- Factory calibrated sensitivity scale factor
- User self-test
Accelerometer Features:
The triple-axis MEMS accelerometer in MPU-60X0 includes a wide range of features:
- Digital-output triple-axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
- Integrated 16-bit ADCs enable simultaneous sampling of accelerometers while requiring no external multiplexer
- Accelerometer normal operating current: 500µA
- Low power accelerometer mode current: 10µA at 1.25Hz, 20µA at 5Hz, 60µA at 20Hz, 110µA at 40Hz
- Orientation detection and signaling
- Tap detection
- User-programmable interrupts
- High-G interrupt
- User self-test
2. Connection:
The connection as following:
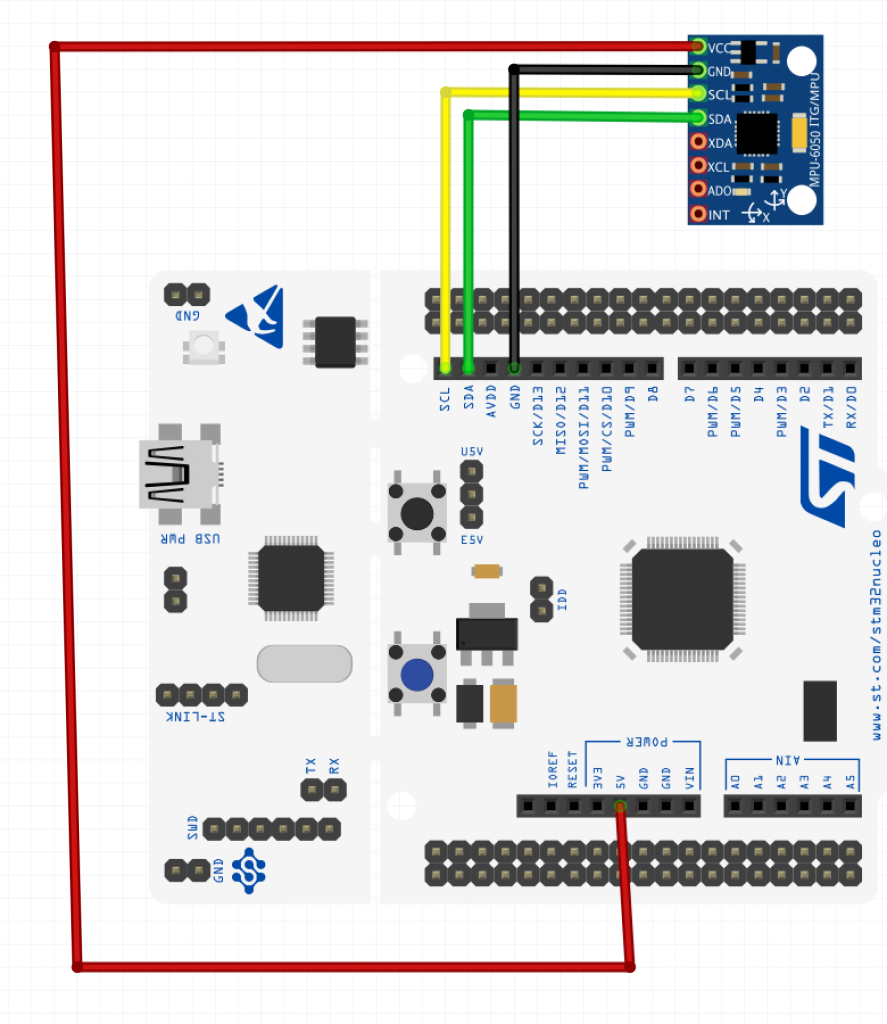
| MPU6050 | STM32F411 |
| Vcc | 5V |
| GND | GND |
| SDA | PB9 |
| SCL | PB8 |
3. Developing the driver:
Before we starting developing the driver, we need the following:
Also, we need uart to transmit data over uart (uart , retargeting printf ).
We start of by creating new source and header file with name of mpu6050.c and mpu6050.h respectively.
Within the header:
Include the following header files
//Header Files #include "i2c.h" #include <string.h> #include <stdbool.h> //Boolean #include <math.h> //Pow()
Define the registers:
//Define Registers #define MPU_ADDR 0x68 #define WHO_AM_I_REG 0x75 #define PWR_MAGT_1_REG 0x6B #define CONFIG_REG 0x1A #define GYRO_CONFIG_REG 0x1B #define ACCEL_CONFIG_REG 0x1C #define SMPLRT_DIV_REG 0x19 #define INT_STATUS_REG 0x3A #define ACCEL_XOUT_H_REG 0x3B #define TEMP_OUT_H_REG 0x41 #define GYRO_XOUT_H_REG 0x43 #define FIFO_EN_REG 0x23 #define INT_ENABLE_REG 0x38 #define I2CMACO_REG 0x23 #define USER_CNT_REG 0x6A #define FIFO_COUNTH_REG 0x72 #define FIFO_R_W_REG 0x74
Define the struct for MPU configuration:
//1- MPU Configuration
typedef struct
{
uint8_t ClockSource;
uint8_t Gyro_Full_Scale;
uint8_t Accel_Full_Scale;
uint8_t CONFIG_DLPF;
bool Sleep_Mode_Bit;
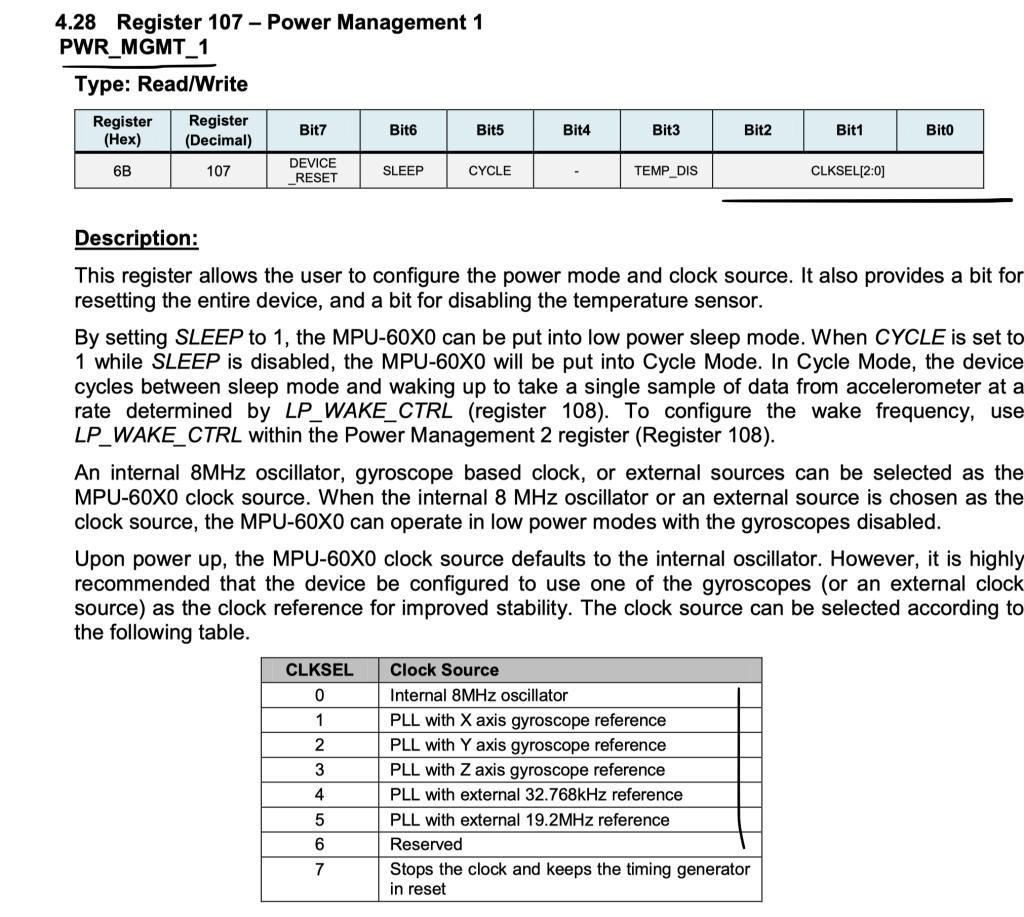
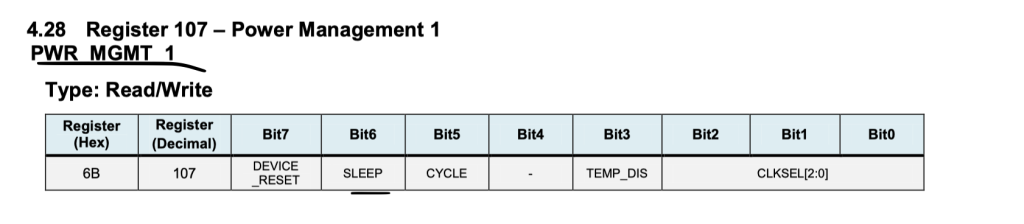
}MPU_ConfigTypeDef;Enum for clock source:
//2- Clock Source ENUM
enum PM_CLKSEL_ENUM
{
Internal_8MHz = 0x00,
X_Axis_Ref = 0x01,
Y_Axis_Ref = 0x02,
Z_Axis_Ref = 0x03,
Ext_32_768KHz = 0x04,
Ext_19_2MHz = 0x05,
TIM_GENT_INREST = 0x07
};Gyro full scale:
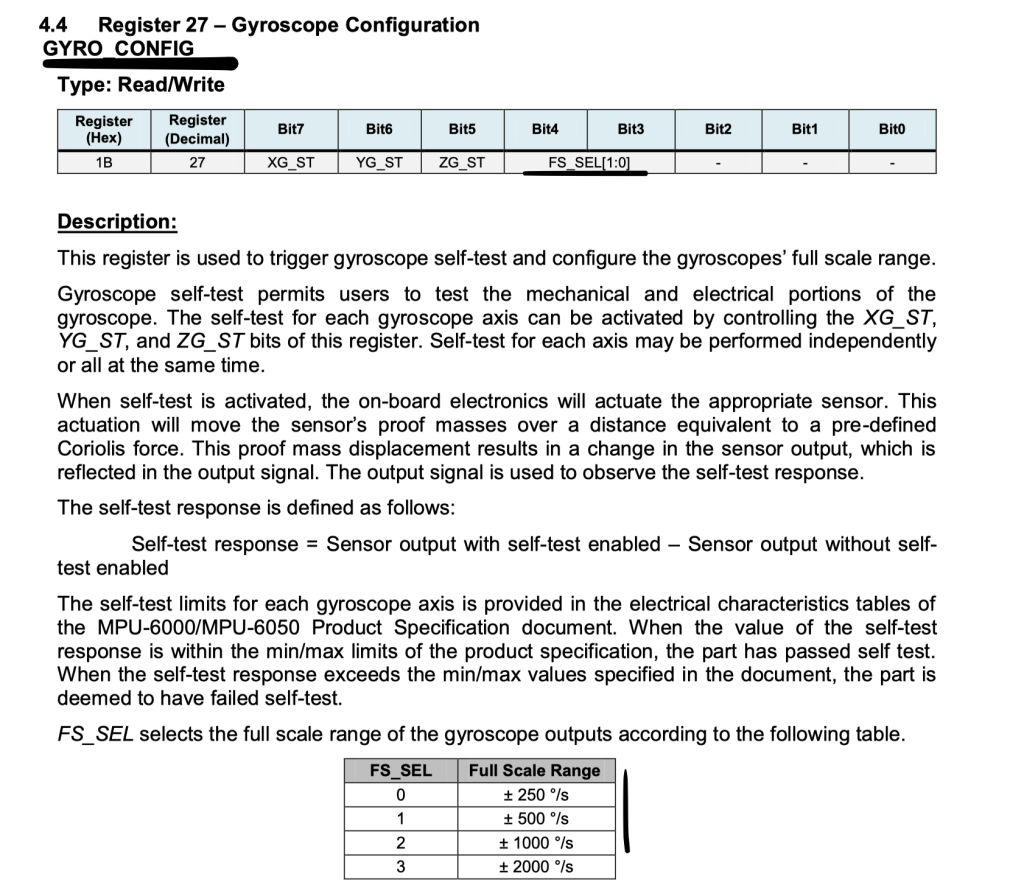
//3- Gyro Full Scale Range ENUM (deg/sec)
enum gyro_FullScale_ENUM
{
FS_SEL_250 = 0x00,
FS_SEL_500 = 0x01,
FS_SEL_1000 = 0x02,
FS_SEL_2000 = 0x03
};Accelerometer scale:
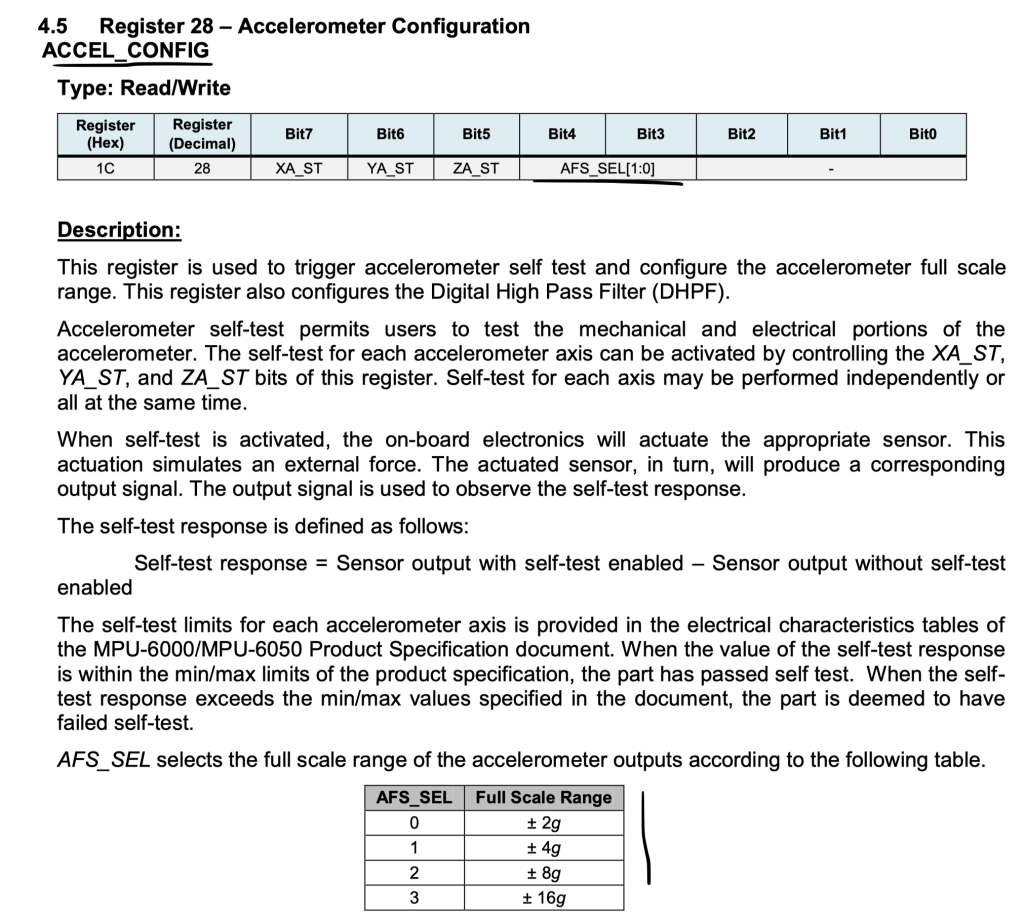
//4- Accelerometer Full Scale Range ENUM (1g = 9.81m/s2)
enum accel_FullScale_ENUM
{
AFS_SEL_2g = 0x00,
AFS_SEL_4g,
AFS_SEL_8g,
AFS_SEL_16g
};Digital low pass filter:
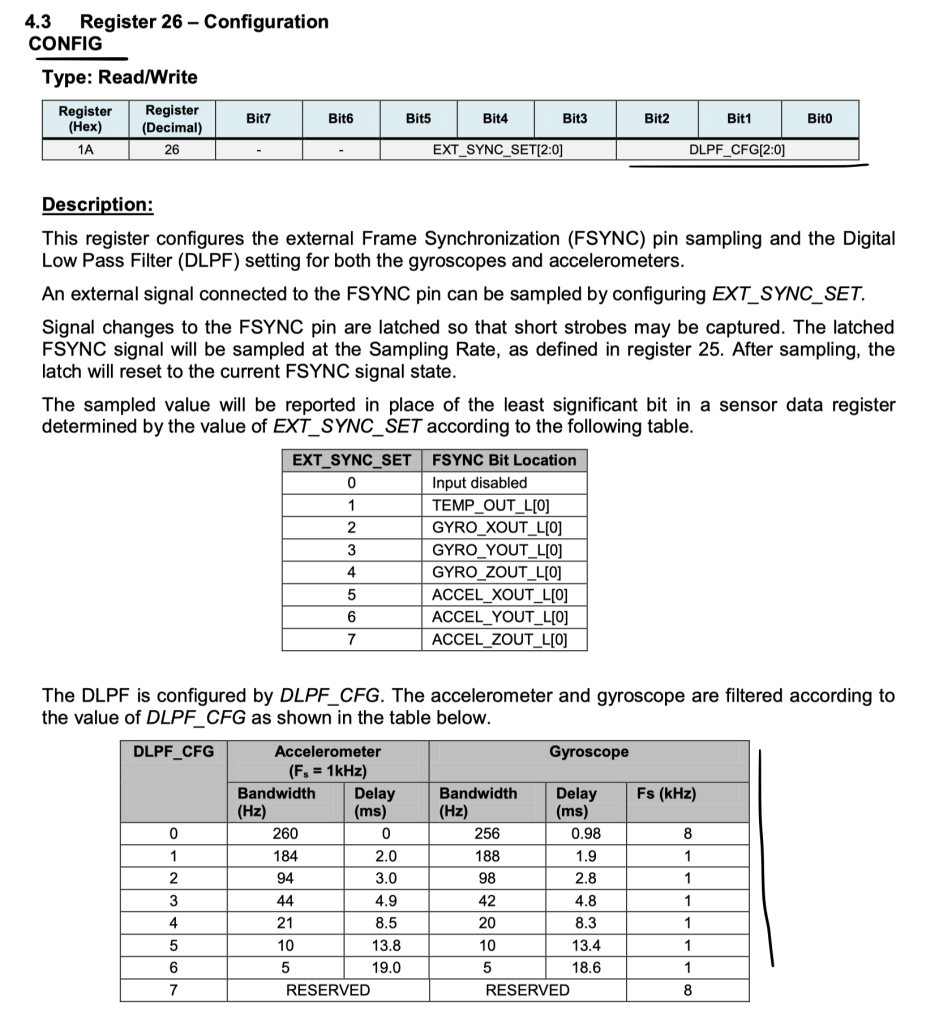
enum DLPF_CFG_ENUM
{
DLPF_260A_256G_Hz = 0x00,
DLPF_184A_188G_Hz = 0x01,
DLPF_94A_98G_Hz = 0x02,
DLPF_44A_42G_Hz = 0x03,
DLPF_21A_20G_Hz = 0x04,
DLPF_10_Hz = 0x05,
DLPF_5_Hz = 0x06
};External frame sync:
/6- e external Frame Synchronization ENUM
enum EXT_SYNC_SET_ENUM
{
input_Disable = 0x00,
TEMP_OUT_L = 0x01,
GYRO_XOUT_L = 0x02,
GYRO_YOUT_L = 0x03,
GYRO_ZOUT_L = 0x04,
ACCEL_XOUT_L = 0x05,
ACCEL_YOUT_L = 0x06,
ACCEL_ZOUT_L = 0x07
};Raw data struct:
//7. Raw data typedef
typedef struct
{
int16_t x;
int16_t y;
int16_t z;
}RawData_Def;
Scaled data struct:
//8. Scaled data typedef
typedef struct
{
float x;
float y;
float z;
}ScaledData_Def;
Function prototypes:
//Function Prototype //2- i2c Read void I2C_Read(uint8_t ADDR, uint8_t *i2cBuf, uint8_t NofData); //3- i2c Write 8 Bit void I2C_Write8(uint8_t ADDR, uint8_t data); //4- MPU6050 Initialaztion Configuration void MPU6050_Config(MPU_ConfigTypeDef *config); //5- Get Sample Rate Divider uint8_t MPU6050_Get_SMPRT_DIV(void); //6- Set Sample Rate Divider void MPU6050_Set_SMPRT_DIV(uint8_t SMPRTvalue); //7- External Frame Sync. uint8_t MPU6050_Get_FSYNC(void); //8- Set External Frame Sync. void MPU6050_Set_FSYNC(enum EXT_SYNC_SET_ENUM ext_Sync); //9- Get Accel Raw Data void MPU6050_Get_Accel_RawData(RawData_Def *rawDef);//************ //10- Get Accel scaled data void MPU6050_Get_Accel_Scale(ScaledData_Def *scaledDef);//*********** //11- Get Accel calibrated data void MPU6050_Get_Accel_Cali(ScaledData_Def *CaliDef); //12- Get Gyro Raw Data void MPU6050_Get_Gyro_RawData(RawData_Def *rawDef); //13- Get Gyro scaled data void MPU6050_Get_Gyro_Scale(ScaledData_Def *scaledDef); //14- Accel Calibration void _Accel_Cali(float x_min, float x_max, float y_min, float y_max, float z_min, float z_max);
Hence, the entire header file:
//Header Files
#include "i2c.h"
#include <string.h>
#include <stdbool.h> //Boolean
#include <math.h> //Pow()
//Define Registers
#define MPU_ADDR 0x68
#define WHO_AM_I_REG 0x75
#define PWR_MAGT_1_REG 0x6B
#define CONFIG_REG 0x1A
#define GYRO_CONFIG_REG 0x1B
#define ACCEL_CONFIG_REG 0x1C
#define SMPLRT_DIV_REG 0x19
#define INT_STATUS_REG 0x3A
#define ACCEL_XOUT_H_REG 0x3B
#define TEMP_OUT_H_REG 0x41
#define GYRO_XOUT_H_REG 0x43
#define FIFO_EN_REG 0x23
#define INT_ENABLE_REG 0x38
#define I2CMACO_REG 0x23
#define USER_CNT_REG 0x6A
#define FIFO_COUNTH_REG 0x72
#define FIFO_R_W_REG 0x74
//TypeDefs and Enums
//1- MPU Configuration
typedef struct
{
uint8_t ClockSource;
uint8_t Gyro_Full_Scale;
uint8_t Accel_Full_Scale;
uint8_t CONFIG_DLPF;
bool Sleep_Mode_Bit;
}MPU_ConfigTypeDef;
//2- Clock Source ENUM
enum PM_CLKSEL_ENUM
{
Internal_8MHz = 0x00,
X_Axis_Ref = 0x01,
Y_Axis_Ref = 0x02,
Z_Axis_Ref = 0x03,
Ext_32_768KHz = 0x04,
Ext_19_2MHz = 0x05,
TIM_GENT_INREST = 0x07
};
//3- Gyro Full Scale Range ENUM (deg/sec)
enum gyro_FullScale_ENUM
{
FS_SEL_250 = 0x00,
FS_SEL_500 = 0x01,
FS_SEL_1000 = 0x02,
FS_SEL_2000 = 0x03
};
//4- Accelerometer Full Scale Range ENUM (1g = 9.81m/s2)
enum accel_FullScale_ENUM
{
AFS_SEL_2g = 0x00,
AFS_SEL_4g,
AFS_SEL_8g,
AFS_SEL_16g
};
//5- Digital Low Pass Filter ENUM
enum DLPF_CFG_ENUM
{
DLPF_260A_256G_Hz = 0x00,
DLPF_184A_188G_Hz = 0x01,
DLPF_94A_98G_Hz = 0x02,
DLPF_44A_42G_Hz = 0x03,
DLPF_21A_20G_Hz = 0x04,
DLPF_10_Hz = 0x05,
DLPF_5_Hz = 0x06
};
//6- e external Frame Synchronization ENUM
enum EXT_SYNC_SET_ENUM
{
input_Disable = 0x00,
TEMP_OUT_L = 0x01,
GYRO_XOUT_L = 0x02,
GYRO_YOUT_L = 0x03,
GYRO_ZOUT_L = 0x04,
ACCEL_XOUT_L = 0x05,
ACCEL_YOUT_L = 0x06,
ACCEL_ZOUT_L = 0x07
};
//7. Raw data typedef
typedef struct
{
int16_t x;
int16_t y;
int16_t z;
}RawData_Def;
//8. Scaled data typedef
typedef struct
{
float x;
float y;
float z;
}ScaledData_Def;
//Function Prototype
//2- i2c Read
void I2C_Read(uint8_t ADDR, uint8_t *i2cBuf, uint8_t NofData);
//3- i2c Write 8 Bit
void I2C_Write8(uint8_t ADDR, uint8_t data);
//4- MPU6050 Initialaztion Configuration
void MPU6050_Config(MPU_ConfigTypeDef *config);
//5- Get Sample Rate Divider
uint8_t MPU6050_Get_SMPRT_DIV(void);
//6- Set Sample Rate Divider
void MPU6050_Set_SMPRT_DIV(uint8_t SMPRTvalue);
//7- External Frame Sync.
uint8_t MPU6050_Get_FSYNC(void);
//8- Set External Frame Sync.
void MPU6050_Set_FSYNC(enum EXT_SYNC_SET_ENUM ext_Sync);
//9- Get Accel Raw Data
void MPU6050_Get_Accel_RawData(RawData_Def *rawDef);//************
//10- Get Accel scaled data
void MPU6050_Get_Accel_Scale(ScaledData_Def *scaledDef);//***********
//11- Get Accel calibrated data
void MPU6050_Get_Accel_Cali(ScaledData_Def *CaliDef);
//12- Get Gyro Raw Data
void MPU6050_Get_Gyro_RawData(RawData_Def *rawDef);
//13- Get Gyro scaled data
void MPU6050_Get_Gyro_Scale(ScaledData_Def *scaledDef);
//14- Accel Calibration
void _Accel_Cali(float x_min, float x_max, float y_min, float y_max, float z_min, float z_max);
Thats all for header file.
The source file:
Include the following:
#include "MPU6050.h" #include "i2c.h" #include "time_base.h"
Static variable for the library:
//2- Accel & Gyro Scaling Factor static float accelScalingFactor, gyroScalingFactor; //3- Bias variables static float A_X_Bias = 0.0f; static float A_Y_Bias = 0.0f; static float A_Z_Bias = 0.0f; static int16_t GyroRW[3];
MPU configuration:
void MPU6050_Config(MPU_ConfigTypeDef *config)
{
uint8_t Buffer = 0;
//Clock Source
//Reset Device
i2c_writeByte(MPU_ADDR, PWR_MAGT_1_REG, 0x80);
delay(100);
Buffer = config ->ClockSource & 0x07; //change the 7th bits of register
Buffer |= (config ->Sleep_Mode_Bit << 6) &0x40; // change only the 7th bit in the register
i2c_writeByte(MPU_ADDR,PWR_MAGT_1_REG, Buffer);
delay(100); // should wait 10ms after changeing the clock setting.
//Set the Digital Low Pass Filter
Buffer = 0;
Buffer = config->CONFIG_DLPF & 0x07;
i2c_writeByte(MPU_ADDR,CONFIG_REG, Buffer);
//Select the Gyroscope Full Scale Range
Buffer = 0;
Buffer = (config->Gyro_Full_Scale << 3) & 0x18;
i2c_writeByte(MPU_ADDR,GYRO_CONFIG_REG, Buffer);
//Select the Accelerometer Full Scale Range
Buffer = 0;
Buffer = (config->Accel_Full_Scale << 3) & 0x18;
i2c_writeByte(MPU_ADDR,ACCEL_CONFIG_REG, Buffer);
//Set SRD To Default
MPU6050_Set_SMPRT_DIV(0x04);
//Accelerometer Scaling Factor, Set the Accelerometer and Gyroscope Scaling Factor
switch (config->Accel_Full_Scale)
{
case AFS_SEL_2g:
accelScalingFactor = (2000.0f/32768.0f);
break;
case AFS_SEL_4g:
accelScalingFactor = (4000.0f/32768.0f);
break;
case AFS_SEL_8g:
accelScalingFactor = (8000.0f/32768.0f);
break;
case AFS_SEL_16g:
accelScalingFactor = (16000.0f/32768.0f);
break;
default:
break;
}
//Gyroscope Scaling Factor
switch (config->Gyro_Full_Scale)
{
case FS_SEL_250:
gyroScalingFactor = 250.0f/32768.0f;
break;
case FS_SEL_500:
gyroScalingFactor = 500.0f/32768.0f;
break;
case FS_SEL_1000:
gyroScalingFactor = 1000.0f/32768.0f;
break;
case FS_SEL_2000:
gyroScalingFactor = 2000.0f/32768.0f;
break;
default:
break;
}
}Get the sample rate:
//5- Get Sample Rate Divider
uint8_t MPU6050_Get_SMPRT_DIV(void)
{
uint8_t Buffer = 0;
i2c_readByte(MPU_ADDR,SMPLRT_DIV_REG,&Buffer);
return Buffer;
}
Set the sample rate:
//6- Set Sample Rate Divider
void MPU6050_Set_SMPRT_DIV(uint8_t SMPRTvalue)
{
i2c_writeByte(MPU_ADDR,SMPLRT_DIV_REG, SMPRTvalue);
}
Get eh external FYSNC:
uint8_t MPU6050_Get_FSYNC(void)
{
uint8_t Buffer = 0;
i2c_readByte(MPU_ADDR,CONFIG_REG, &Buffer);
Buffer &= 0x38;
return (Buffer>>3);
}Set the FYSNC:
//8- Set External Frame Sync.
void MPU6050_Set_FSYNC(enum EXT_SYNC_SET_ENUM ext_Sync)
{
uint8_t Buffer = 0;
i2c_readByte(MPU_ADDR,CONFIG_REG, &Buffer);
Buffer &= ~0x38;
Buffer |= (ext_Sync <<3);
i2c_writeByte(MPU_ADDR,CONFIG_REG, Buffer);
}Get the raw acceleration data:
//9- Get Accel Raw Data
void MPU6050_Get_Accel_RawData(RawData_Def *rawDef)
{
uint8_t state;
uint8_t AcceArr[6], GyroArr[6];
i2c_readByte(MPU_ADDR,INT_STATUS_REG, &state);
if((state&&0x01))
{
i2c_ReadMulti(MPU_ADDR,ACCEL_XOUT_H_REG, 6,AcceArr);
//Accel Raw Data
rawDef->x = ((AcceArr[0]<<8) + AcceArr[1]); // x-Axis
rawDef->y = ((AcceArr[2]<<8) + AcceArr[3]); // y-Axis
rawDef->z = ((AcceArr[4]<<8) + AcceArr[5]); // z-Axis
//Gyro Raw Data
i2c_ReadMulti(MPU_ADDR,GYRO_XOUT_H_REG, 6,GyroArr);
GyroRW[0] = ((GyroArr[0]<<8) + GyroArr[1]);
GyroRW[1] = (GyroArr[2]<<8) + GyroArr[3];
GyroRW[2] = ((GyroArr[4]<<8) + GyroArr[5]);
}
}
Get the acceleration data:
//10- Get Accel scaled data (g unit of gravity, 1g = 9.81m/s2)
void MPU6050_Get_Accel_Scale(ScaledData_Def *scaledDef)
{
RawData_Def AccelRData;
MPU6050_Get_Accel_RawData(&AccelRData);
//Accel Scale data
scaledDef->x = ((AccelRData.x+0.0f)*accelScalingFactor)/1000;
scaledDef->y = ((AccelRData.y+0.0f)*accelScalingFactor)/1000;
scaledDef->z = ((AccelRData.z+0.0f)*accelScalingFactor)/1000;
}
Get the acceleration calibrated data:
//11- Get Accel calibrated data
void MPU6050_Get_Accel_Cali(ScaledData_Def *CaliDef)
{
ScaledData_Def AccelScaled;
MPU6050_Get_Accel_Scale(&AccelScaled);
//Accel Scale data
CaliDef->x = (AccelScaled.x) - A_X_Bias; // x-Axis
CaliDef->y = (AccelScaled.y) - A_Y_Bias;// y-Axis
CaliDef->z = (AccelScaled.z) - A_Z_Bias;// z-Axis
}Get the Gyro data:
//12- Get Gyro Raw Data
void MPU6050_Get_Gyro_RawData(RawData_Def *rawDef)
{
//Accel Raw Data
rawDef->x = GyroRW[0];
rawDef->y = GyroRW[1];
rawDef->z = GyroRW[2];
}
//13- Get Gyro scaled data
void MPU6050_Get_Gyro_Scale(ScaledData_Def *scaledDef)
{
RawData_Def myGyroRaw;
MPU6050_Get_Gyro_RawData(&myGyroRaw);
//Gyro Scale data
scaledDef->x = (myGyroRaw.x)*gyroScalingFactor; // x-Axis
scaledDef->y = (myGyroRaw.y)*gyroScalingFactor; // y-Axis
scaledDef->z = (myGyroRaw.z)*gyroScalingFactor; // z-Axis
}
Calibrate the acceleration:
//14- Accel Calibration
void _Accel_Cali(float x_min, float x_max, float y_min, float y_max, float z_min, float z_max)
{
//1* X-Axis calibrate
A_X_Bias = (x_max + x_min)/2.0f;
//2* Y-Axis calibrate
A_Y_Bias = (y_max + y_min)/2.0f;
//3* Z-Axis calibrate
A_Z_Bias = (z_max + z_min)/2.0f;
}In main.c:
#include "i2c.h"
#include "time_base.h"
#include "uart.h"
#include "stdio.h"
#include "MPU6050.h"
#define rate 300
uint32_t previous;
int main(void)
{
Ticks_Init(16000000);
uart2_rxtx_init();
i2c_init();
MPU_ConfigTypeDef myConfig;
myConfig.Accel_Full_Scale = AFS_SEL_4g;
myConfig.ClockSource = Internal_8MHz;
myConfig.CONFIG_DLPF = DLPF_184A_188G_Hz;
myConfig.Sleep_Mode_Bit = 0;
myConfig.Gyro_Full_Scale = FS_SEL_500;
MPU6050_Config(&myConfig);
ScaledData_Def meAccel;
while(1)
{
MPU6050_Get_Accel_Scale(&meAccel);
if(get_Ticks()-previous >rate)
{
printf("Accel: X = %.2f Y = %.2f Z = %.2f\r\n", meAccel.x, meAccel.y, meAccel.z);
printf("==============================\r\n");
previous=get_Ticks();
}
}
}
For the configuration:
First, Set thee acceleration scale for 4G:
myConfig.Accel_Full_Scale = AFS_SEL_4g;
Set the clock to be internal 8MHz:
myConfig.ClockSource = Internal_8MHz;
Configure the filter:
myConfig.CONFIG_DLPF = DLPF_184A_188G_Hz;
Exit from sleep mode:
myConfig.Sleep_Mode_Bit = 0;
Set the gyro scale:
myConfig.Gyro_Full_Scale = FS_SEL_500;
Pass the data structure to MPU configuration function as following:
MPU6050_Config(&myConfig);
4. Code:
You may download the code from here:
5. Results:
Upload the code to your F411RE Nucleo and open serial monitor and set the buadrare to 115200:
Happy coding 🙂
2 Comments
How do you get the gyro values? this code only allows the accel values. Thank you.
There are functions to read the gyroscope.
You can use them.
Add Comment