In this guide, we shall take a look at the LIS3DSH Accelerometer that embedded within the STM32F407 discovery and how to read the acceleration data.
In this guide, we shall cover the following:
- LIS3DSH Sensor.
- Enable the float point hardware.
- Interfacing the sensor.
- Results.
1. LIS3DSH Sensor:
Features
Wide supply voltage, 1.71 V to 3.6 V
The LIS3DSH has dynamically selectable full scales of 2g/±4g/6g/8g/16g and is capable of measuring accelerations with output data rates from 3.125 Hz to 1.6 kHz.
Independent IOs supply (1.8 V) and supply voltage compatible
Ultra-low power consumption
2g/±4g/6g/8g/16g dynamically selectable full scale
I 2 C/SPI digital output interface
16-bit data output
Programmable embedded state machines
Embedded temperature sensor
Embedded self-test
Embedded FIFO
10000 g high shock survivability
ECOPACK ® , RoHS and “Green” compliant
The self-test capability allows the user to check the functioning of the sensor in the final application.
The device can be configured to generate interrupt signals activated by user-defined motion patterns.
The LIS3DSH has an integrated first-in, first-out (FIFO) buffer allowing the user to store data in order to limit intervention by the host processor.
The LIS3DSH is available in a small thin plastic land grid array package (LGA) and is guaranteed to operate over an extended temperature range from -40 °C to +85 °C.
Applications
Motion-controlled user interface
Gaming and virtual reality
Pedometers
Intelligent power saving for handheld devices
Display orientation
Click/double-click recognition
Impact recognition and logging
Vibration monitoring and compensation

2. Enable Float Point Hardware:
Before enabling the hardware, please refer to this guide for how to setup STM32CubeIDE.
After that, create new source file with name of sys_init.c
Within the source file, include the following header file:
#include "stm32f4xx.h"
Declare add the following function:
void SystemInit(void)
{
/*Enable FPU*/
SCB->CPACR |= ((3UL << 10*2)|(3UL << 11*2));
}This function shall be called when the STM32 starts. No need to call it in our application.
3. Interfacing the sensor:
Create new source and header file with name of LIS3DSH.c and LIS3DSH.h respectively.
Before we start developing the header and source file, we need to find the pins connected to the accelerometer.
From the STM32F407-discovery board schematics:

We can find that:
- PA5, PA6 and PA7 for the SPI pins.
- PE3 for chip select (CS)
New, within the header file, include the following:
#include "stdint.h"
Add these define statements for the registers of the sensors:
#define LIS3DSH_OUT_T_ADDR 0x0C
/*******************************************************************************
* INFO1 Register: Information Register 1
* Read only register
* Default value: 0x21
*******************************************************************************/
#define LIS3DSH_INFO1_ADDR 0x0D
/*******************************************************************************
* INFO2 Register: Information Register 2
* Read only register
* Default value: 0x00
*******************************************************************************/
#define LIS3DSH_INFO2_ADDR 0x0E
/*******************************************************************************
* WHO_AM_I Register: Device Identification Register
* Read only register
* Default value: 0x3F
*******************************************************************************/
#define LIS3DSH_WHO_AM_I_ADDR 0x0F
/*******************************************************************************
* OFF_X Register: X-axis Offset Compensation Register
* Read Write register
* Default value: 0x00
* 7:0 OFFx_7-OFFx_0: X-axis Offset Compensation Value
*******************************************************************************/
#define LIS3DSH_OFF_X_ADDR 0x10
/*******************************************************************************
* OFF_Y Register: Y-axis Offset Compensation Register
* Read Write register
* Default value: 0x00
* 7:0 OFFy_7-OFFy_0: Y-axis Offset Compensation Value
*******************************************************************************/
#define LIS3DSH_OFF_Y_ADDR 0x11
/*******************************************************************************
* OFF_Z Register: Z-axis Offset Compensation Register
* Read Write register
* Default value: 0x00
* 7:0 OFFz_7-OFFz_0: Z-axis Offset Compensation Value
*******************************************************************************/
#define LIS3DSH_OFF_Z_ADDR 0x12
/*******************************************************************************
* CS_X Register: X-axis Constant Shift Register
* Read Write register
* Default value: 0x00
* 7:0 CS_7-CS_0: X-axis Constant Shift Value
*******************************************************************************/
#define LIS3DSH_CS_X_ADDR 0x13
/*******************************************************************************
* CS_Y Register: Y-axis Constant Shift Register
* Read Write register
* Default value: 0x00
* 7:0 CS_7-CS_0: Y-axis Constant Shift Value
*******************************************************************************/
#define LIS3DSH_CS_Y_ADDR 0x14
/*******************************************************************************
* CS_Z Register: Z-axis Constant Shift Value Register
* Read Write register
* Default value: 0x00
* 7:0 CS_7-CS_0: Z-axis Constant Shift Value
*******************************************************************************/
#define LIS3DSH_CS_Z_ADDR 0x15
/*******************************************************************************
* LC_L Register: Long Counter Low Register
* Read Write register
* Default value: 0x01
* 7:0 LC_L_7-LC_L_0: Long Counter Low Value
*******************************************************************************/
#define LIS3DSH_LC_L_ADDR 0x16
/*******************************************************************************
* LC_H Register: Long Counter High Register
* Read Write register
* Default value: 0x00
* 7:0 LC_H_7-LC_H_0: Long Counter Low Value
*******************************************************************************/
#define LIS3DSH_LC_H_ADDR 0x17
/*******************************************************************************
* STAT Register: State Machine Register
* Read only register
* Default value: 0x00
* 7 LONG: LONG flag common to both State Machines
* 0 - no interrupt
* 1 - LongCounter interrupt flag
* 6 SYNCW: Common information for OUTW host action waiting
* 0 - no action waiting from Host
* 1 - Host action is waiting after OUTW command
* 5 SYNC1:
* 0 - State Machine 1 running normally
* 1 - SM1 stopped and waiting for restart request from SM2
* 4 SYNC2:
* 0 - State Machine 2 running normally
* 1 - SM2 stopped and waiting for restart request from SM1
* 3 INT_SM1: Interrupt signal on SM1 is reset when OUTS1 register is read
* 0 - no interrupt on State Machine 1
* 1 - State Machine 1 interrupt happened
* 2 INT_SM2: Interrupt signal on SM2 is reset when OUTS2 register is read
* 0 - no interrupt on State Machine 2
* 1 - State Machine 2 interrupt happened
* 1 DOR: Data OverRun bit
* 0 - no overrun
* 1 - data overrun
* 0 DRDY: New data are ready in output registers
* 0 - data not ready
* 1 - data ready
*******************************************************************************/
#define LIS3DSH_STAT_ADDR 0x18
/*******************************************************************************
* PEAK1 Register: Peak 1 Register
* Read only register
* Default value: 0x00
* 7:0 PKx_7-PKx_0: Peak 1 Value for SM1
*******************************************************************************/
#define LIS3DSH_PEAK1_ADDR 0x19
/*******************************************************************************
* PEAK2 Register: Peak 2 Register
* Read only register
* Default value: 0x00
* 7:0 PKx_7-PKx_0: Peak 2 value for SM2
*******************************************************************************/
#define LIS3DSH_PEAK2_ADDR 0x1A
/*******************************************************************************
* VFC_1 Register: Vector Filter Coefficient 1 Register
* Read Write register
* Default value: 0x00
* 7:0 VFC1_7-VFC1_0: Vector Filter Coefficient 1 Value
*******************************************************************************/
#define LIS3DSH_VFC_1_ADDR 0x1B
/*******************************************************************************
* VFC_2 Register: Vector Filter Coefficient 2 Register
* Read Write register
* Default value: 0x00
* 7:0 VFC2_7-VFC2_0: Vector Filter Coefficient 2 Value
*******************************************************************************/
#define LIS3DSH_VFC_2_ADDR 0x1C
/*******************************************************************************
* VFC_3 Register: Vector Filter Coefficient 3 Register
* Read Write register
* Default value: 0x00
* 7:0 VFC3_7-VFC3_0: Vector Filter Coefficient 3 Value
*******************************************************************************/
#define LIS3DSH_VFC_3_ADDR 0x1D
/*******************************************************************************
* VFC_4 Register: Vector Filter Coefficient 4 Register
* Read Write register
* Default value: 0x00
* 7:0 VFC4_7-VFC4_0: Vector Filter Coefficient 4 Value
*******************************************************************************/
#define LIS3DSH_VFC_4_ADDR 0x1E
/*******************************************************************************
* THRS3 Register: Threshold Value 3 Register
* Read Write register
* Default value: 0x00
* 7:0 THRS3_7-THRS3_0: Common Threshold for Overrun Detection Value
*******************************************************************************/
#define LIS3DSH_THRS3_ADDR 0x1F
/*******************************************************************************
* CTRL_REG4 Register: Control Register 4
* Read Write register
* Default value: 0x07
* 7:4 ODR3-ODR0: Data rate selection
* ODR3 | ODR2 | ODR1 | ORD0 | ORD Selection
* -------------------------------------------
* 0 | 0 | 0 | 0 | Power Down (Default)
* 0 | 0 | 0 | 1 | 3.125 Hz
* 0 | 0 | 1 | 0 | 6.25 Hz
* 0 | 0 | 1 | 1 | 12.5 Hz
* 0 | 1 | 0 | 0 | 25 Hz
* 0 | 1 | 0 | 1 | 50 Hz
* 0 | 1 | 1 | 0 | 100 Hz
* 0 | 1 | 1 | 1 | 400 Hz
* 1 | 0 | 0 | 0 | 800 Hz
* 1 | 0 | 0 | 1 | 1600 Hz
*
* 3 BDU: Block data update
* 0: Output register not updated until High and Low reading (Default)
* 1: Continuous update
* 2 ZEN:
* 0: Z-axis disable (Default)
* 1: Z-axis enable
* 1 YEN:
* 0: Y-axis disable (Default)
* 1: Y-axis enable
* 0 XEN:
* 0: Y-axis disable (Default)
* 1: Y-axis enable
*******************************************************************************/
#define LIS3DSH_CTRL_REG4_ADDR 0x20
/*******************************************************************************
* CTRL_REG1 Register: Control Register 1 (SM1 interrupt configuration register)
* Read Write register
* Default value: 0x00
* 7:5 HYST1_2-HYST1_0: Hysteresis which is added or subtracted from the
* threshold values (THRS1_1 and THRS2_1) of SM1.
* 000 = 0 (Default)
* 111 = 7 (maximum Hysteresis)
* 4 Reserved
* 3 SM1_INT:
* 0: State Machine 1 interrupt routed to INT1 (Default)
* 1: State Machine 1 interrupt routed to INT2
* 2 Reserved
* 1 Reserved
* 0 SM1_EN:
* 0: State Machine 1 disabled. Temporary memories and registers
* related to this State Machine are left intact. (Default)
* 1: State Machine 1 enabled.
*******************************************************************************/
#define LIS3DSH_CTRL_REG1_ADDR 0x21
/*******************************************************************************
* CTRL_REG2 Register: Control Register 2 (SM2 interrupt configuration register)
* Read Write register
* Default value: 0x00
* 7:5 HYST2_2-HYST2_0: Hysteresis which is added or subtracted from the
* threshold values (THRS1_2 and THRS2_2) of SM1.
* 000 = 0 (Default)
* 111 = 7 (maximum Hysteresis)
* 4 Reserved
* 3 SM2_INT:
* 0: State Machine 2 interrupt routed to INT1 (Default)
* 1: State Machine 2 interrupt routed to INT2
* 2 Reserved
* 1 Reserved
* 0 SM2_EN:
* 0: State Machine 2 disabled. Temporary memories and registers
* related to this State Machine are left intact. (Default)
* 1: State Machine 2 enabled.
*******************************************************************************/
#define LIS3DSH_CTRL_REG2_ADDR 0x22
/*******************************************************************************
* CTRL_REG3 Register: Control Register 3
* Read Write register
* Default value: 0x00
* 7 DR_EN: Data-ready interrupt
* 0 - Data-ready interrupt disabled (Default)
* 1 - Data-ready interrupt enabled and routed to INT1
* 6 IEA:
* 0 - Interrupt signal active LOW (Default)
* 1 - Interrupt signal active HIGH
* 5 IEL:
* 0 - Interrupt latched (Default)
* 1 - Interrupt pulsed
* 4 INT2_EN:
* 0 - INT2 signal disabled (High-Z state) (Default)
* 1 - INT2 signal enabled (signal pin fully functional)
* 3 INT1_EN:
* 0 - INT1 (DRDY) signal disabled (High-Z state) (Default)
* 1 - INT1 (DRDY) signal enabled (signal pin fully functional) DR_EN bit in CTRL_REG3 register should be taken into account too
* 2 VLIFT:
* 0 - Vector filter disabled (Default)
* 1 - Vector filter enabled
* 1 Reserved
* 0 STRT: Soft Reset
* 0 - (Default)
* 1 - it resets the whole internal logic circuitry. It automatically returns to 0.
*******************************************************************************/
#define LIS3DSH_CTRL_REG3_ADDR 0x23
/*******************************************************************************
* CTRL_REG5 Register: Control Register 5
* Read Write register
* Default value: 0x00
* 7:6 BW2-BW1: Anti aliasing filter bandwidth
* BW2 | BW1 | BW Selection
* -------------------------
* 0 | 0 | 800 Hz (Default)
* 0 | 1 | 40 Hz
* 1 | 0 | 200 Hz
* 1 | 1 | 50 Hz
*
* 5:3 FSCALE2-FSCALE0: Full scale selection
* FSCALE2 | FSCALE1 | FSCALE0 | Full scale selection
* --------------------------------------------------
* 0 | 0 | 0 | +/-2g (Default)
* 0 | 0 | 1 | +/-4g
* 0 | 1 | 0 | +/-6g
* 0 | 1 | 1 | +/-8g
* 1 | 0 | 0 | +/-16g
*
* 2:1 ST2_ST1: Self-test Enable
* ST2 | ST1 | ST Selection
* -------------------------
* 0 | 0 | Normal Mode (Default)
* 0 | 1 | Positive sign self-test
* 1 | 0 | Negative sign-test
* 1 | 1 | Not Allowed
*
* 0 SIM: SPI serial internal interface mode selection
* 0: 4-wire interface (Default)
* 1: 3-wire interface
*******************************************************************************/
#define LIS3DSH_CTRL_REG5_ADDR 0x24
/*******************************************************************************
* CTRL_REG6 Register: Control Register 6
* Read Write register
* Default value: 0x00
* 7 BOOT: Force reboot, cleared as soon as the reboot is finished. Active High.
* 6 FIFO_EN: FIFO Enable
* 0: disable (Default)
* 1: enable
* 5 STP_WTM: Stop on Watermark - FIFO depth can be limited at the Watermark value, by setting to �1� the STP_WTM bit.
* 0: disable (Default)
* 1: enable
* 4 IF_ADD_INC: Register address automatically increased during a multiple byte access with a serial interface (I2C or SPI)
* 0: disable (Default)
* 1: enable
* 3 I1_EMPTY: Enable FIFO Empty indication on INT1 pin.
* 0: disable (Default)
* 1: enable
* 2 I1_WTM: FIFO Watermark interrupt on INT1 pin.
* 0: disable (Default)
* 1: enable
* 1 I1_OVERRUN: FIFO Overrun interrupt on INT1 pin.
* 0: disable (Default)
* 1: enable
* 0 I2_BOOT: BOOT interrupt on INT2 pin.
* 0: disable (Default)
* 1: enable
*******************************************************************************/
#define LIS3DSH_CTRL_REG6_ADDR 0x25
/*******************************************************************************
* STATUS Register: Status Data Register
* Read only register
* Default value: 0x00
* 7 ZYXOR: X, Y and Z-axis Data Overrun.
* 0: no Overrun has occurred (Default)
* 1: a new set of data has overwritten the previous ones
* 6 ZOR: Z-axis Data Overrun.
* 0: no Overrun has occurred (Default)
* 1: a new data for the Z-axis has overwritten the previous ones
* 5 YOR: Y-axis Data Overrun.
* 0: no Overrun has occurred (Default)
* 1: a new data for the Y-axis has overwritten the previous ones
* 4 XOR: X-axis Data Overrun.
* 0: no Overrun has occurred (Default)
* 1: a new data for the X-axis has overwritten the previous ones
* 3 ZYXDA: X, Y and Z-axis new Data Available.
* 0: a new set of data is not yet available (Default)
* 1: a new set of data is available
* 2 ZDA: Z-axis new data available.
* 0: a new data for the Z-axis is not yet available (Default)
* 1: a new data for Z-axis is available
* 1 YDA: Y-axis new data available.
* 0: a new data for the Y-axis is not yet available (Default)
* 1: a new data for Y-axis is available
* 0 XDA: X-axis new data available.
* 0: a new data for the X-axis is not yet available (Default)
* 1: a new data for X-axis is available
*******************************************************************************/
#define LIS3DSH_STATUS_ADDR 0x27
/*******************************************************************************
* OUT_X_L Register: X-axis Output Acceleration Low Data
* Read only register
* Default value: output
* 7:0 XD7-XD0: X-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_X_L_ADDR 0x28
/*******************************************************************************
* OUT_X_H Register: X-axis Output Acceleration High Data
* Read only register
* Default value: output
* 15:8 XD15-XD8: X-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_X_H_ADDR 0x29
/*******************************************************************************
* OUT_Y_L Register: Y-axis Output Acceleration Low Data
* Read only register
* Default value: output
* 7:0 YD7-YD0: Y-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_Y_L_ADDR 0x2A
/*******************************************************************************
* OUT_Y_H Register: Y-axis Output Acceleration High Data
* Read only register
* Default value: output
* 15:8 YD15-YD8: Y-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_Y_H_ADDR 0x2B
/*******************************************************************************
* OUT_Z_L Register: Z-axis Output Acceleration Low Data
* Read only register
* Default value: output
* 7:0 ZD7-ZD0: Z-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_Z_L_ADDR 0x2C
/*******************************************************************************
* OUT_Z_H Register: Z-axis Output Acceleration High Data
* Read only register
* Default value: output
* 15:8 ZD15-ZD8: Z-axis output Data
*******************************************************************************/
#define LIS3DSH_OUT_Z_H_ADDR 0x2D
/*******************************************************************************
* FIFO_CTRL Register: FIFO Control Register
* Read/Write register
* Default value: 0x00
* 7:5 FMODE2-FMODE0: FIFO mode
* FMODE2 | FMODE1 | FMODE0 | Mode description
* --------------------------------------------------
* 0 | 0 | 0 | Bypass mode. FIFO turned off. (Default)
* 0 | 0 | 1 | FIFO mode. Stop collecting data when FIFO is full.
* 0 | 1 | 0 | Stream mode. If the FIFO is full, the new sample overwrites the older one (circular buffer).
* 0 | 1 | 1 | Stream mode until trigger is de-asserted, then FIFO mode.
* 1 | 0 | 0 | Bypass mode until trigger is de-asserted, then Stream mode.
* 1 | 0 | 1 | Not to use.
* 1 | 1 | 0 | Not to use.
* 1 | 1 | 1 | Bypass mode until trigger is de-asserted, then FIFO mode.
*
* 4:0 WTMP4-WTMP0: FIFO Watermark pointer. It is the FIFO depth when the Watermark is enabled
*******************************************************************************/
#define LIS3DSH_FIFO_CTRL_ADDR 0x2E
/*******************************************************************************
* FIFO_SRC Register: FIFO Source Register
* Read only register
* Default value: 0x00
* 7 WTM: Watermark status.
* 0: FIFO filling is lower than WTM level (Default)
* 1: FIFO filling is equal or higher than WTM level
* 6 OVRN_FIFO: Overrun bit status.
* 0: FIFO is not completely filled (Default)
* 1: FIFO is completely filled
* 5 EMPTY: Overrun bit status.
* 0: FIFO not empty (Default)
* 1: FIFO empty
* 4:0 FSS: Number of samples stored in the FIFO - 1
*******************************************************************************/
#define LIS3DSH_FIFO_SRC_ADDR 0x2F
/*******************************************************************************
* ST1_X Register: State Machine 1 Code Registers
* Write only register
* Default value: 0x00
* 7:0 ST1_7-ST1_0: State Machine 1 Code Registers
*******************************************************************************/
#define LIS3DSH_ST1_1_ADDR 0x40
#define LIS3DSH_ST1_2_ADDR 0x41
#define LIS3DSH_ST1_3_ADDR 0x42
#define LIS3DSH_ST1_4_ADDR 0x43
#define LIS3DSH_ST1_5_ADDR 0x44
#define LIS3DSH_ST1_6_ADDR 0x45
#define LIS3DSH_ST1_7_ADDR 0x46
#define LIS3DSH_ST1_8_ADDR 0x47
#define LIS3DSH_ST1_9_ADDR 0x48
#define LIS3DSH_ST1_10_ADDR 0x49
#define LIS3DSH_ST1_11_ADDR 0x4A
#define LIS3DSH_ST1_12_ADDR 0x4B
#define LIS3DSH_ST1_13_ADDR 0x4C
#define LIS3DSH_ST1_14_ADDR 0x4D
#define LIS3DSH_ST1_15_ADDR 0x4E
#define LIS3DSH_ST1_16_ADDR 0x4F
/*******************************************************************************
* TIM4_1 Register: SM1 General Timer 4 Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM1 Timer 4 Counter 1 Value
*******************************************************************************/
#define LIS3DSH_TIM4_1_ADDR 0x50
/*******************************************************************************
* TIM3_1 Register: SM1 General Timer 3 Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM1 Timer 3 Counter 1 Value
*******************************************************************************/
#define LIS3DSH_TIM3_1_ADDR 0x51
/*******************************************************************************
* TIM2_1_L Register: SM1 General Timer 2 Low Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM1 Timer 2 Counter 1 Low Value
*******************************************************************************/
#define LIS3DSH_TIM2_1_L_ADDR 0x52
/*******************************************************************************
* TIM2_1_H Register: SM1 General Timer 2 High Register
* Write only register
* Default value: 0x00
* 15:8 TM_15-TM_8: SM1 Timer 2 Counter 1 High Value
*******************************************************************************/
#define LIS3DSH_TIM2_1_H_ADDR 0x53
/*******************************************************************************
* TIM1_1_L Register: SM1 General Timer 1 Low Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM1 Timer 1 Counter 1 Low Value
*******************************************************************************/
#define LIS3DSH_TIM1_1_L_ADDR 0x54
/*******************************************************************************
* TIM1_1_H Register: SM1 General Timer 1 High Register
* Write only register
* Default value: 0x00
* 15:8 TM_15-TM_8: SM1 Timer 1 Counter 1 High Value
*******************************************************************************/
#define LIS3DSH_TIM1_1_H_ADDR 0x55
/*******************************************************************************
* THRS2_1 Register: SM1 Threshold Value 1 Register
* Write only register
* Default value: 0x00
* 7:0 THS7-THS0: SM1 Threshold Value 1
*******************************************************************************/
#define LIS3DSH_THRS2_1_ADDR 0x56
/*******************************************************************************
* THRS1_1 Register: SM1 Threshold Value 2 Register
* Write only register
* Default value: 0x00
* 7:0 THS7-THS0: SM1 Threshold Value 2
*******************************************************************************/
#define LIS3DSH_THRS1_1_ADDR 0x57
/*******************************************************************************
* MASK1_B Register: SM1 Swap Axis and Sign Mask Register
* Write only register
* Default value: 0x00
* 7 P_X: X-Axis Positive Motion Detection
* 0: X+ disabled
* 1: X+ enabled
* 6 N_X: X-Axis Negative Motion Detection
* 0: X- disabled
* 1: X- enabled
* 5 P_Y: Y-Axis Positive Motion Detection
* 0: Y+ disabled
* 1: Y+ enabled
* 4 N_Y: Y-Axis Negative Motion Detection
* 0: Y- disabled
* 1: Y- enabled
* 3 P_Z: X-Axis Positive Motion Detection
* 0: Z+ disabled
* 1: Z+ enabled
* 2 N_Z: X-Axis Negative Motion Detection
* 0: Z- disabled
* 1: Z- enabled
* 1 P_V:
* 0: V+ disabled
* 1: V+ enabled
* 0 N_V:
* 0: V- disabled
* 1: V- enabled
*******************************************************************************/
#define LIS3DSH_MASK1_B_ADDR 0x59
/*******************************************************************************
* MASK1_A Register: SM1 Default Axis and Sign Mask Register
* Write only register
* Default value: 0x00
* 7 P_X: X-Axis Positive Motion Detection
* 0: X+ disabled
* 1: X+ enabled
* 6 N_X: X-Axis Negative Motion Detection
* 0: X- disabled
* 1: X- enabled
* 5 P_Y: Y-Axis Positive Motion Detection
* 0: Y+ disabled
* 1: Y+ enabled
* 4 N_Y: Y-Axis Negative Motion Detection
* 0: Y- disabled
* 1: Y- enabled
* 3 P_Z: X-Axis Positive Motion Detection
* 0: Z+ disabled
* 1: Z+ enabled
* 2 N_Z: X-Axis Negative Motion Detection
* 0: Z- disabled
* 1: Z- enabled
* 1 P_V:
* 0: V+ disabled
* 1: V+ enabled
* 0 N_V:
* 0: V- disabled
* 1: V- enabled
*******************************************************************************/
#define LIS3DSH_MASK1_A_ADDR 0x5A
/*******************************************************************************
* SETT1 Register: SM1 Detection Settings Register
* Write only register
* Default value: 0x00
* 7 P_DET: SM1 peak detection bit
* 0: peak detection disabled (Default)
* 1: peak detection enabled
* 6 THR3_SA:
* 0: no action (Default)
* 1: threshold 3 enabled for axis and sign mask reset (MASK1_B)
* 5 ABS:
* 0: unsigned thresholds THRSx (Default)
* 1: signed thresholds THRSx
* 4 Reserved
* 3 Reserved
* 2 THR3_MA:
* 0: no action (Default)
* 1: threshold 3 enabled for axis and sign mask reset (MASK1_A)
* 1 R_TAM: Next condition validation flag
* 0: mask frozen on the axis that triggers the condition (Default)
* 1: standard mask always evaluated
* 0 SITR:
* 0: no actions (Default)
* 1: STOP and CONT commands generate an interrupt and perform output
* actions as OUTC command.
*******************************************************************************/
#define LIS3DSH_SETT1_ADDR 0x5B
/*******************************************************************************
* PR1 Register: SM1 Program and Reset Pointers Register
* Read only register
* Default value: 0x00
* 7:4 PP3-PP0: SM1 program pointer address
* 3:0 RP3-RP0: SM1 reset pointer address
*******************************************************************************/
#define LIS3DSH_PR1_ADDR 0x5C
/*******************************************************************************
* TC1_L Register: SM1 General Timer Counter Low Register
* Read only register
* Default value: 0x00
* 7:0 TC1_7-TC1_0: SM1 General Timer Counter Low Value
*******************************************************************************/
#define LIS3DSH_TC1_L_ADDR 0x5D
/*******************************************************************************
* TC1_H Register: SM1 General Timer Counter High Register
* Read only register
* Default value: 0x00
* 15:8 TC1_15-TC1_8: SM1 General Timer Counter High Value
*******************************************************************************/
#define LIS3DSH_TC1_H_ADDR 0x5E
/*******************************************************************************
* OUTS1 Register: SM1 Output Set Flag Register
* Read only register
* Default value: 0x00
* 7 P_X:
* 0: X+ noshow
* 1: X+ show
* 6 N_X:
* 0: X- noshow
* 1: X- show
* 5 P_Y:
* 0: Y+ noshow
* 1: Y+ show
* 4 N_Y:
* 0: Y- noshow
* 1: Y- show
* 3 P_Z:
* 0: Z+ noshow
* 1: Z+ show
* 2 N_Z:
* 0: Z- noshow
* 1: Z- show
* 1 P_V:
* 0: V+ noshow
* 1: V+ show
* 0 N_V:
* 0: V- noshow
* 1: V- show
*******************************************************************************/
#define LIS3DSH_OUTS1_ADDR 0x5F
/*******************************************************************************
* ST2_X Register: State Machine 2 Code Registers
* Write only register
* Default value: 0x00
* 7:0 ST2_7-ST2_0: State Machine 2 Code Registers
*******************************************************************************/
#define LIS3DSH_ST2_1_ADDR 0x60
#define LIS3DSH_ST2_2_ADDR 0x61
#define LIS3DSH_ST2_3_ADDR 0x62
#define LIS3DSH_ST2_4_ADDR 0x63
#define LIS3DSH_ST2_5_ADDR 0x64
#define LIS3DSH_ST2_6_ADDR 0x65
#define LIS3DSH_ST2_7_ADDR 0x66
#define LIS3DSH_ST2_8_ADDR 0x67
#define LIS3DSH_ST2_9_ADDR 0x68
#define LIS3DSH_ST2_10_ADDR 0x69
#define LIS3DSH_ST2_11_ADDR 0x6A
#define LIS3DSH_ST2_12_ADDR 0x6B
#define LIS3DSH_ST2_13_ADDR 0x6C
#define LIS3DSH_ST2_14_ADDR 0x6D
#define LIS3DSH_ST2_15_ADDR 0x6E
#define LIS3DSH_ST2_16_ADDR 0x6F
/*******************************************************************************
* TIM4_2 Register: SM2 General Timer 4 Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM2 Timer 4 Counter 1 Value
*******************************************************************************/
#define LIS3DSH_TIM4_2_ADDR 0x70
/*******************************************************************************
* TIM3_2 Register: SM2 General Timer 3 Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM2 Timer 3 Counter 2 Value
*******************************************************************************/
#define LIS3DSH_TIM3_2_ADDR 0x71
/*******************************************************************************
* TIM2_2_L Register: SM2 General Timer 2 Low Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM2 Timer 2 Counter 2 Low Value
*******************************************************************************/
#define LIS3DSH_TIM2_2_L_ADDR 0x72
/*******************************************************************************
* TIM2_2_H Register: SM2 General Timer 2 High Register
* Write only register
* Default value: 0x00
* 15:8 TM_15-TM_8: SM2 Timer 2 Counter 2 High Value
*******************************************************************************/
#define LIS3DSH_TIM2_2_H_ADDR 0x73
/*******************************************************************************
* TIM1_2_L Register: SM2 General Timer 1 Low Register
* Write only register
* Default value: 0x00
* 7:0 TM_7-TM_0: SM2 Timer 1 Counter 2 Low Value
*******************************************************************************/
#define LIS3DSH_TIM1_2_L_ADDR 0x74
/*******************************************************************************
* TIM1_2_H Register: SM2 General Timer 1 High Register
* Write only register
* Default value: 0x00
* 15:8 TM_15-TM_8: SM2 Timer 1 Counter 2 High Value
*******************************************************************************/
#define LIS3DSH_TIM1_2_H_ADDR 0x75
/*******************************************************************************
* THRS2_2 Register: SM2 Threshold Value 1 Register
* Write only register
* Default value: 0x00
* 7:0 THS7-THS0: SM2 Threshold Value
*******************************************************************************/
#define LIS3DSH_THRS2_2_ADDR 0x76
/*******************************************************************************
* THRS1_2 Register: SM2 Threshold Value 2 Register
* Write only register
* Default value: 0x00
* 7:0 THS7-THS0: SM2 Threshold Value
*******************************************************************************/
#define LIS3DSH_THRS1_2_ADDR 0x77
/*******************************************************************************
* DES2 Register: SM2 Decimation Counter Value Register
* Write only register
* Default value: 0x00
* 7:0 D7-D0: SM2 Decimation Counter Value
*******************************************************************************/
#define LIS3DSH_DES2_ADDR 0x78
/*******************************************************************************
* MASK2_B Register: SM2 Axis and Sign Mask Register
* Write only register
* Default value: 0x00
* 7 P_X: X-Axis Positive Motion Detection
* 0: X+ disabled
* 1: X+ enabled
* 6 N_X: X-Axis Negative Motion Detection
* 0: X- disabled
* 1: X- enabled
* 5 P_Y: Y-Axis Positive Motion Detection
* 0: Y+ disabled
* 1: Y+ enabled
* 4 N_Y: Y-Axis Negative Motion Detection
* 0: Y- disabled
* 1: Y- enabled
* 3 P_Z: X-Axis Positive Motion Detection
* 0: Z+ disabled
* 1: Z+ enabled
* 2 N_Z: X-Axis Negative Motion Detection
* 0: Z- disabled
* 1: Z- enabled
* 1 P_V:
* 0: V+ disabled
* 1: V+ enabled
* 0 N_V:
* 0: V- disabled
* 1: V- enabled
*******************************************************************************/
#define LIS3DSH_MASK2_B_ADDR 0x79
/*******************************************************************************
* MASK2_A Register: SM2 Axis and Sign Mask Register
* Write only register
* Default value: 0x00
* 7 P_X: X-Axis Positive Motion Detection
* 0: X+ disabled
* 1: X+ enabled
* 6 N_X: X-Axis Negative Motion Detection
* 0: X- disabled
* 1: X- enabled
* 5 P_Y: Y-Axis Positive Motion Detection
* 0: Y+ disabled
* 1: Y+ enabled
* 4 N_Y: Y-Axis Negative Motion Detection
* 0: Y- disabled
* 1: Y- enabled
* 3 P_Z: X-Axis Positive Motion Detection
* 0: Z+ disabled
* 1: Z+ enabled
* 2 N_Z: X-Axis Negative Motion Detection
* 0: Z- disabled
* 1: Z- enabled
* 1 P_V:
* 0: V+ disabled
* 1: V+ enabled
* 0 N_V:
* 0: V- disabled
* 1: V- enabled
*******************************************************************************/
#define LIS3DSH_MASK2_A_ADDR 0x7A
/*******************************************************************************
* SETT2 Register: SM2 Detection Settings Register
* Write only register
* Default value: 0x00
* 7 P_DET: SM2 peak detection
* 0: peak detection disabled (Default)
* 1: peak detection enabled
* 6 THR3_SA:
* 0: no action (Default)
* 1: threshold 3 limit value for axis and sign mask reset (MASK2_B)
* 5 ABS:
* 0: unsigned thresholds (Default)
* 1: signed thresholds
* 4 RADI:
* 0: raw data
* 1: diff data for State Machine 2
* 3 D_CS:
* 0: DIFF2 enabled (difference between current data and previous data)
* 1: constant shift enabled (difference between current data and constant values)
* 2 THR3_MA:
* 0: no action (Default)
* 1: threshold 3 enabled for axis and sign mask reset (MASK2_A)
* 1 R_TAM: Next condition validation flag
* 0: mask frozen on the axis that triggers the condition (Default)
* 1: standard mask always evaluated
* 0 SITR:
* 0: no actions (Default)
* 1: STOP and CONT commands generate an interrupt and perform output
* actions as OUTC command.
*******************************************************************************/
#define LIS3DSH_SETT2_ADDR 0x7B
/*******************************************************************************
* PR2 Register: SM2 Program and Reset Pointers Register
* Read only register
* Default value: 0x00
* 7:4 PP3-PP0: SM1 program pointer address
* 3:0 RP3-RP0: SM1 reset pointer address
*******************************************************************************/
#define LIS3DSH_PR2_ADDR 0x7C
/*******************************************************************************
* TC2_L Register: SM2 General Timer Counter Low Register
* Read only register
* Default value: 0x00
* 7:0 TC2_7-TC2_0: SM2 General Timer Counter Low Value
*******************************************************************************/
#define LIS3DSH_TC2_L_ADDR 0x7D
/*******************************************************************************
* TC2_H Register: SM2 General Timer Counter High Register
* Read only register
* Default value: 0x00
* 15:8 TC2_15-TC2_8: SM2 General Timer Counter High Value
*******************************************************************************/
#define LIS3DSH_TC2_H_ADDR 0x7E
/*******************************************************************************
* OUTS2 Register: SM2 Output Set Flag Register
* Read only register
* Default value: 0x00
* 7 P_X:
* 0: X+ noshow
* 1: X+ show
* 6 N_X:
* 0: X- noshow
* 1: X- show
* 5 P_Y:
* 0: Y+ noshow
* 1: Y+ show
* 4 N_Y:
* 0: Y- noshow
* 1: Y- show
* 3 P_Z:
* 0: Z+ noshow
* 1: Z+ show
* 2 N_Z:
* 0: Z- noshow
* 1: Z- show
* 1 P_V:
* 0: V+ noshow
* 1: V+ show
* 0 N_V:
* 0: V- noshow
* 1: V- show
*******************************************************************************/
#define LIS3DSH_OUTS2_ADDR 0x7F
/******************************************************************************/
/**************************** END REGISTER MAPPING ***************************/
/******************************************************************************/
#define I_AM_LIS3DSH 0x3F
/** @defgroup Sensitivity_selection
* @{
*/
#define LIS3DSH_SENSITIVITY_0_06G 0.06 /* 0.06 mg/digit*/
#define LIS3DSH_SENSITIVITY_0_12G 0.12 /* 0.12 mg/digit*/
#define LIS3DSH_SENSITIVITY_0_18G 0.18 /* 0.18 mg/digit*/
#define LIS3DSH_SENSITIVITY_0_24G 0.24 /* 0.24 mg/digit*/
#define LIS3DSH_SENSITIVITY_0_73G 0.73 /* 0.73 mg/digit*/
/**
* @}
*/
/** @defgroup Data_Rate_Power_Mode_selection
* @{
*/
#define LIS3DSH_DATARATE_POWERDOWN ((uint8_t)0x00) /* Power Down Mode*/
#define LIS3DSH_DATARATE_3_125 ((uint8_t)0x10) /* 3.125 Hz Normal Mode */
#define LIS3DSH_DATARATE_6_25 ((uint8_t)0x20) /* 6.25 Hz Normal Mode */
#define LIS3DSH_DATARATE_12_5 ((uint8_t)0x30) /* 12.5 Hz Normal Mode */
#define LIS3DSH_DATARATE_25 ((uint8_t)0x40) /* 25 Hz Normal Mode */
#define LIS3DSH_DATARATE_50 ((uint8_t)0x50) /* 50 Hz Normal Mode */
#define LIS3DSH_DATARATE_100 ((uint8_t)0x60) /* 100 Hz Normal Mode */
#define LIS3DSH_DATARATE_400 ((uint8_t)0x70) /* 400 Hz Normal Mode */
#define LIS3DSH_DATARATE_800 ((uint8_t)0x80) /* 800 Hz Normal Mode */
#define LIS3DSH_DATARATE_1600 ((uint8_t)0x90) /* 1600 Hz Normal Mode */
/**
* @}
*/
/** @defgroup Full_Scale_selection
* @{
*/
#define LIS3DSH_FULLSCALE_2 ((uint8_t)0x00) /* 2 g */
#define LIS3DSH_FULLSCALE_4 ((uint8_t)0x08) /* 4 g */
#define LIS3DSH_FULLSCALE_6 ((uint8_t)0x10) /* 6 g */
#define LIS3DSH_FULLSCALE_8 ((uint8_t)0x18) /* 8 g */
#define LIS3DSH_FULLSCALE_16 ((uint8_t)0x20) /* 16 g */
#define LIS3DSH__FULLSCALE_SELECTION ((uint8_t)0x38)
/**
* @}
*/
/** @defgroup Anti-Aliasing_Filter_Bandwidth
* @{
*/
#define LIS3DSH_FILTER_BW_800 ((uint8_t)0x00) /* 800 Hz */
#define LIS3DSH_FILTER_BW_40 ((uint8_t)0x08) /* 40 Hz */
#define LIS3DSH_FILTER_BW_200 ((uint8_t)0x10) /* 200 Hz */
#define LIS3DSH_FILTER_BW_50 ((uint8_t)0x18) /* 50 Hz */
/**
* @}
*/
/** @defgroup Self_Test_selection
* @{
*/
#define LIS3DSH_SELFTEST_NORMAL ((uint8_t)0x00)
#define LIS3DSH_SELFTEST_P ((uint8_t)0x02)
#define LIS3DSH_SELFTEST_M ((uint8_t)0x04)
/**
* @}
*/
/** @defgroup Direction_XYZ_selection
* @{
*/
#define LIS3DSH_X_ENABLE ((uint8_t)0x01)
#define LIS3DSH_Y_ENABLE ((uint8_t)0x02)
#define LIS3DSH_Z_ENABLE ((uint8_t)0x04)
#define LIS3DSH_XYZ_ENABLE ((uint8_t)0x07)
/**
* @}
*/
/** @defgroup SPI_Serial_Interface_Mode_selection
* @{
*/
#define LIS3DSH_SERIALINTERFACE_4WIRE ((uint8_t)0x00)
#define LIS3DSH_SERIALINTERFACE_3WIRE ((uint8_t)0x01)
/**
* @}
*/
/** @defgroup Interrupt_Request_selection Interrupt_Selection_Enable
* @{
*/
#define LIS3DSH_INTERRUPT_REQUEST_LATCHED ((uint8_t)0x00)
#define LIS3DSH_INTERRUPT_REQUEST_PULSED ((uint8_t)0x20)
/**
* @}
*/
/** @defgroup Interrupt_Selection_Enable
* @{
*/
#define LIS3DSH_INTERRUPT_1_ENABLE ((uint8_t)0x88)
#define LIS3DSH_INTERRUPT_2_ENABLE ((uint8_t)0x00)
#define LIS3DSH_INTERRUPT_1_2_ENABLE ((uint8_t)0x88)
/**
* @}
*/
/** @defgroup Interrupt_Signal_Active_Selection
* @{
*/
#define LIS3DSH_INTERRUPT_SIGNAL_LOW ((uint8_t)0x00)
#define LIS3DSH_INTERRUPT_SIGNAL_HIGH ((uint8_t)0x40)
/**
* @}
*/
/** @defgroup State_Machine_Enable
* @{
*/
#define LIS3DSH_SM_ENABLE ((uint8_t)0x01)
#define LIS3DSH_SM_DISABLE ((uint8_t)0x00)
/**
* @}
*/
/** @defgroup State_Machine_Routed_Interrupt
* @{
*/
#define LIS3DSH_SM_INT1 ((uint8_t)0x00)
#define LIS3DSH_SM_INT2 ((uint8_t)0x08)
/**
* @}
*/
/** @defgroup Boot_Mode_selection
* @{
*/
#define LIS3DSH_BOOT_NORMALMODE ((uint8_t)0x00)
#define LIS3DSH_BOOT_FORCED ((uint8_t)0x80)
/**
* @}
*/
/** @defgroup FIFO_Mode_selection
* @{
*/
#define LIS3DSH_FIFO_BYPASS_MODE ((uint8_t)0x00)
#define LIS3DSH_FIFO_MODE ((uint8_t)0x20)
#define LIS3DSH_FIFO_STREAM_MODE ((uint8_t)0x40)
#define LIS3DSH_FIFO_SF_TRIGGER_MODE ((uint8_t)0x60)
#define LIS3DSH_FIFO_BS_TRIGGER_MODE ((uint8_t)0x80)
#define LIS3DSH_FIFO_BF_TRIGGER_MODE ((uint8_t)0xE0)
Declare the following structure for the initialization sequence:
typedef struct
{
uint8_t Power_Mode; /* Power-down/Active Mode */
uint8_t Output_DataRate; /* OUT data rate 100 Hz / 400 Hz */
uint8_t Axes_Enable; /* Axes enable */
uint8_t Full_Scale; /* Full scale */
uint8_t Self_Test; /* Self test */
}LIS302DL_InitTypeDef;
/* Interrupt struct */
typedef struct
{
uint8_t Latch_Request; /* Latch interrupt request into CLICK_SRC register*/
uint8_t SingleClick_Axes; /* Single Click Axes Interrupts */
uint8_t DoubleClick_Axes; /* Double Click Axes Interrupts */
}LIS302DL_InterruptConfigTypeDef;
/* High Pass Filter struct */
typedef struct
{
uint8_t HighPassFilter_Data_Selection; /* Internal filter bypassed or data from internal filter send to output register*/
uint8_t HighPassFilter_CutOff_Frequency; /* High pass filter cut-off frequency */
uint8_t HighPassFilter_Interrupt; /* High pass filter enabled for Freefall/WakeUp #1 or #2 */
}LIS302DL_FilterConfigTypeDef;
typedef struct
{
uint8_t Output_DataRate; /* Output Data Rate into CTRL_REG4 register */
uint8_t Axes_Enable; /* Axes enable into CTRL_REG4 register */
uint8_t SPI_Wire; /* SPI Wire into CTRL_REG5 register */
uint8_t Self_Test; /* Self test into CTRL_REG5 register */
uint8_t Full_Scale; /* Full scale into CTRL_REG5 register */
uint8_t Filter_BW; /* Filter BW into CTRL_REG5 register */
}LIS3DSH_InitTypeDef;
Declare the following functions:
void LIS3DSH_IO_Init(void); void LIS3DSH_Init(void); void LIS3DSH_GetXYZ(float *x_value,float *y_value,float *z_value);
Don’t forget to add the header guard as following:
#ifndef LIS3DSH_H_ #define LIS3DSH_H_ #endif /* LIS3DSH_H_ */
And add all the above within the header guard.
Thats all for the header file.
In the source file, include the following:
#include "LIS3DSH.h" #include "stm32f4xx.h"
Declare the following variable:
uint8_t scale;
This variable shall store the scale needed to calculate the acceleration in each direction.
Next, we shall initialize the sensor IO as following:
void LIS3DSH_IO_Init(void)
{
/*SPI Pins*/
#define AF05 0x05
RCC->AHB1ENR|=RCC_AHB1ENR_GPIOAEN; //enable clock for GPIOA
GPIOA->MODER|=GPIO_MODER_MODE5_1|GPIO_MODER_MODE6_1|GPIO_MODER_MODE7_1; //set PA5, PA6 and PA7 to alternate function mode
GPIOA->MODER &=~(GPIO_MODER_MODE5_0|GPIO_MODER_MODE6_0|GPIO_MODER_MODE7_0);
GPIOA->AFR[0]|=(AF05<<GPIO_AFRL_AFSEL5_Pos)|(AF05<<GPIO_AFRL_AFSEL6_Pos)|(AF05<<GPIO_AFRL_AFSEL7_Pos);
/*CS Pin*/
RCC->AHB1ENR|=RCC_AHB1ENR_GPIOEEN;
GPIOE->MODER|=GPIO_MODER_MODE3_0;
GPIOE->MODER&=~GPIO_MODER_MODE3_1;
/*Set PE3 to high*/
GPIOE->BSRR|=GPIO_BSRR_BS3;
/*SPI Configuration*/
RCC->APB2ENR|=RCC_APB2ENR_SPI1EN;
SPI1->CR1|=SPI_CR1_SSM|SPI_CR1_BR_0|SPI_CR1_SSI|SPI_CR1_MSTR|SPI_CR1_SPE;
}
For more information how to configure the SPI, please refer to this guide.
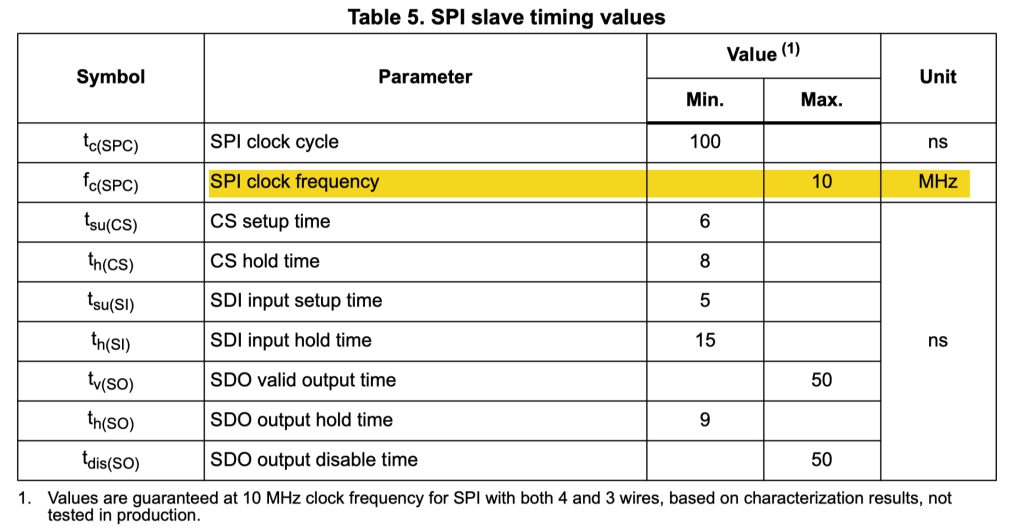
Note: Select the baudrate that shall not exceed the 10MHz since this is maximum can be handled by the sensor.
Also, we need the following functions to read/write from/to SPI bus:
static void SPI1_Write(uint8_t *data, uint32_t size)
{
uint32_t i=0;
while(i<size)
{
/*Wait until TXE is set*/
while(!(SPI1->SR & (SPI_SR_TXE))){}
/*Write the data to the data register*/
SPI1->DR = data[i];
i++;
}
/*Wait until TXE is set*/
while(!(SPI1->SR & (SPI_SR_TXE))){}
/*Wait for BUSY flag to reset*/
while((SPI1->SR & (SPI_SR_BSY))){}
/*Clear OVR flag*/
(void)SPI1->DR;
(void)SPI1->SR;
}
static void SPI1_Read(uint8_t *data,uint32_t size)
{
while(size)
{
/*Send dummy data*/
SPI1->DR =0;
/*Wait for RXNE flag to be set*/
while(!(SPI1->SR & (SPI_SR_RXNE))){}
/*Read data from data register*/
*data++ = (SPI1->DR);
size--;
}
}
Also, we need the following functions that are specific for the sensor:
static void LIS3DSH_IO_Write(uint8_t reg,uint8_t data)
{
/*set both the reg and the data as single array*/
uint8_t temp[2]={reg,data};
/*Set CS Line to low*/
GPIOE->BSRR|=GPIO_BSRR_BR3;
/*Write the data*/
SPI1_Write(temp,2);
/*Set PE3 to high*/
GPIOE->BSRR|=GPIO_BSRR_BS3;
}
static void LIS3DSH_IO_Read(uint8_t MemoryAddress, uint8_t *data, uint32_t size)
{
/*Set CS Line to low*/
GPIOE->BSRR|=GPIO_BSRR_BR3;
uint8_t address=MemoryAddress|0x80;
/*Write the register*/
SPI1_Write(&address,1);
/*Write the data*/
SPI1_Read(data,size);
/*Set PE3 to high*/
GPIOE->BSRR|=GPIO_BSRR_BS3;
}
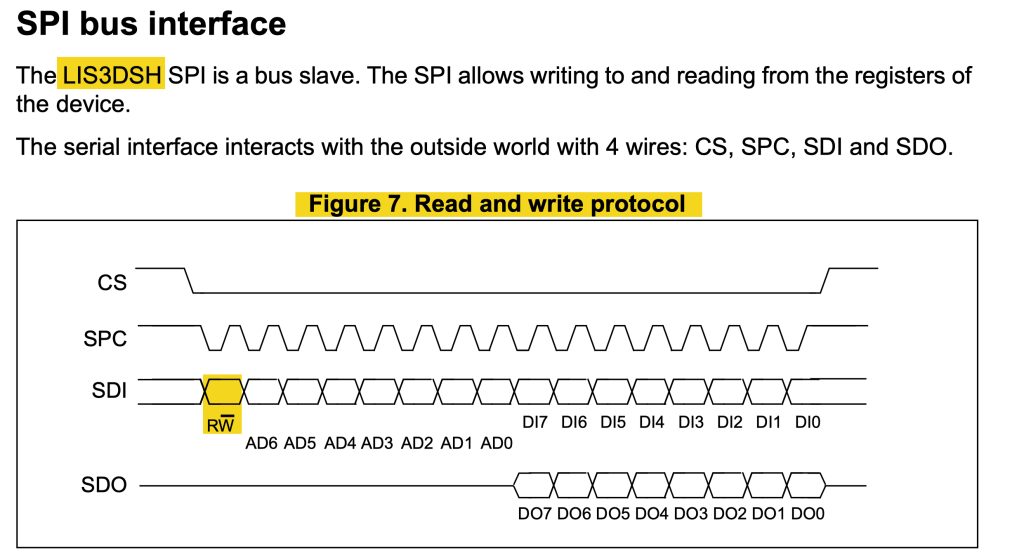
If you noticed, when the address being OR with 0x80. Since this sensor can work with two different buses (i2c and SPI).
In order for the sensor to distinguish between read and write operation, the MSB shall be set to 0 when writing and 1 when reading as shown below:
For the sensor initialization:
void LIS3DSH_Init(void)
{
uint16_t ctrl = 0x0000;
LIS302DL_InitTypeDef lis302dl_initstruct;
LIS302DL_FilterConfigTypeDef lis302dl_filter = {0,0,0};
LIS3DSH_InitTypeDef l1s3dsh_InitStruct;
l1s3dsh_InitStruct.Output_DataRate = LIS3DSH_DATARATE_100;
l1s3dsh_InitStruct.Axes_Enable = LIS3DSH_XYZ_ENABLE;
l1s3dsh_InitStruct.SPI_Wire = LIS3DSH_SERIALINTERFACE_4WIRE;
l1s3dsh_InitStruct.Self_Test = LIS3DSH_SELFTEST_NORMAL;
l1s3dsh_InitStruct.Full_Scale = LIS3DSH_FULLSCALE_2;
l1s3dsh_InitStruct.Filter_BW = LIS3DSH_FILTER_BW_800;
scale=l1s3dsh_InitStruct.Full_Scale;
/* Configure MEMS: power mode(ODR) and axes enable */
ctrl = (uint16_t) (l1s3dsh_InitStruct.Output_DataRate | \
l1s3dsh_InitStruct.Axes_Enable);
LIS3DSH_IO_Write(LIS3DSH_CTRL_REG4_ADDR,ctrl);
/* Configure MEMS: full scale and self test */
ctrl = (uint16_t) ((l1s3dsh_InitStruct.SPI_Wire | \
l1s3dsh_InitStruct.Self_Test | \
l1s3dsh_InitStruct.Full_Scale | \
l1s3dsh_InitStruct.Filter_BW) << 8);
LIS3DSH_IO_Write(LIS3DSH_CTRL_REG5_ADDR,ctrl);
}Feel free to modify according to your needs and add interrupt if you want.
Note: Refer to the datasheet for information about each register.
For getting the sensor values:
void LIS3DSH_GetXYZ(float *x_value,float *y_value,float *z_value)
{
int8_t xyz_data[6];
float sensitivity;
LIS3DSH_IO_Read(LIS3DSH_OUT_X_L_ADDR,xyz_data,6);
switch (scale)
{
case LIS3DSH_FULLSCALE_2: sensitivity=LIS3DSH_SENSITIVITY_0_06G; break;
case LIS3DSH_FULLSCALE_4: sensitivity=LIS3DSH_SENSITIVITY_0_12G; break;
case LIS3DSH_FULLSCALE_6: sensitivity=LIS3DSH_SENSITIVITY_0_18G; break;
case LIS3DSH_FULLSCALE_8: sensitivity=LIS3DSH_SENSITIVITY_0_24G; break;
case LIS3DSH_FULLSCALE_16: sensitivity=LIS3DSH_SENSITIVITY_0_73G; break;
}
int16_t temp;
temp= ((xyz_data[1] << 8) + xyz_data[0]);
*x_value= ((temp*sensitivity));
temp= ((xyz_data[3] << 8) + xyz_data[2]);
*y_value= ((temp*sensitivity*-1));
temp= ((xyz_data[5] << 8) + xyz_data[4]);
*z_value = ((temp*sensitivity));
}In main.c:
#include "delay.h"
#include "stdlib.h"
#include "LIS3DSH.h"
float x,y,z;
int main(void)
{
delay_init(16000000);
LIS3DSH_IO_Init();
LIS3DSH_Init();
while(1)
{
LIS3DSH_GetXYZ(&x,&y,&z);
delay(10);
}
}
4. Results:
Build the project and start a debug session.
Within the debug session, live expression, add the x, y and z variable as following:
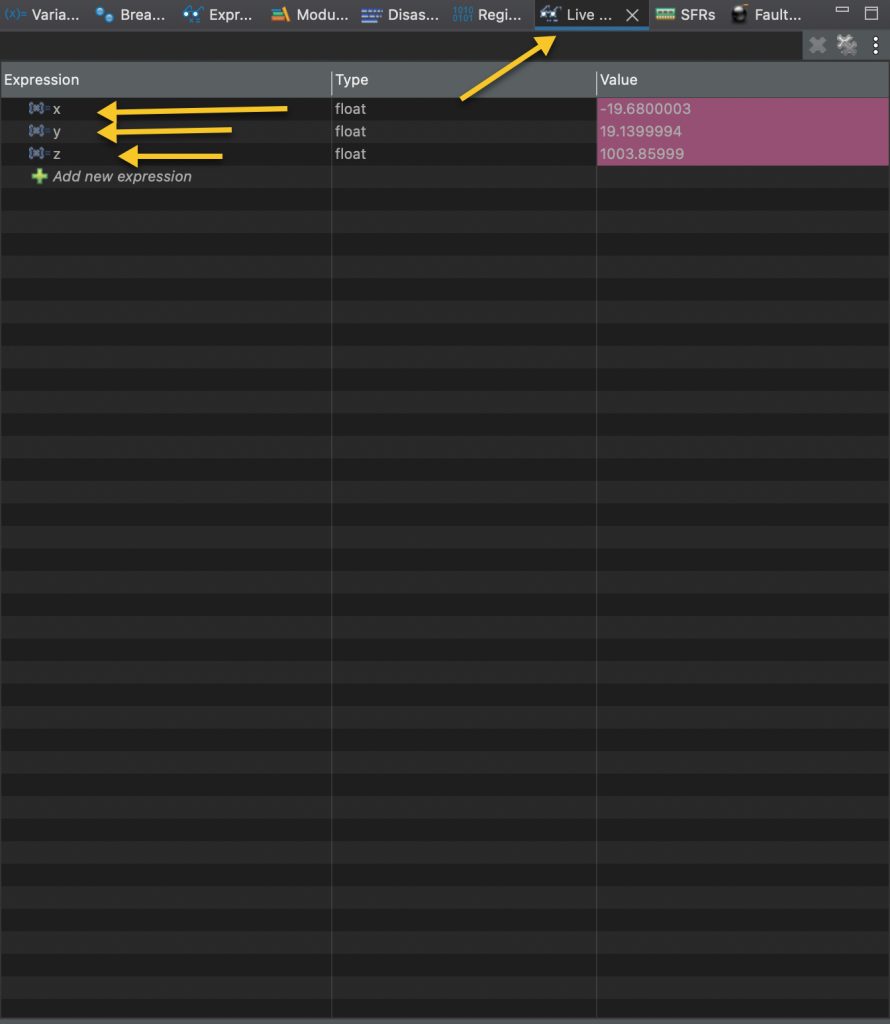
You will get the results.
Note: the values are in mg (milli g) where 1000 represents 1G (9.81 m/s^2).
Happy coding 😉
Add Comment