In Part 2, we shall develop the core firmware and driver logic required to translate time data into the TM1637’s custom serial protocol. This section focuses on implementing the precise bit-banging timing and segment mapping necessary to display live clock digits on the hardware.
In this guide, we shall cover the following:
- Developing microseconds delay.
- Developing TM1637 firmware.
- main.c code.
- Results.
5. Developing Microseconds Delay:
First, we need to create new source and header files.
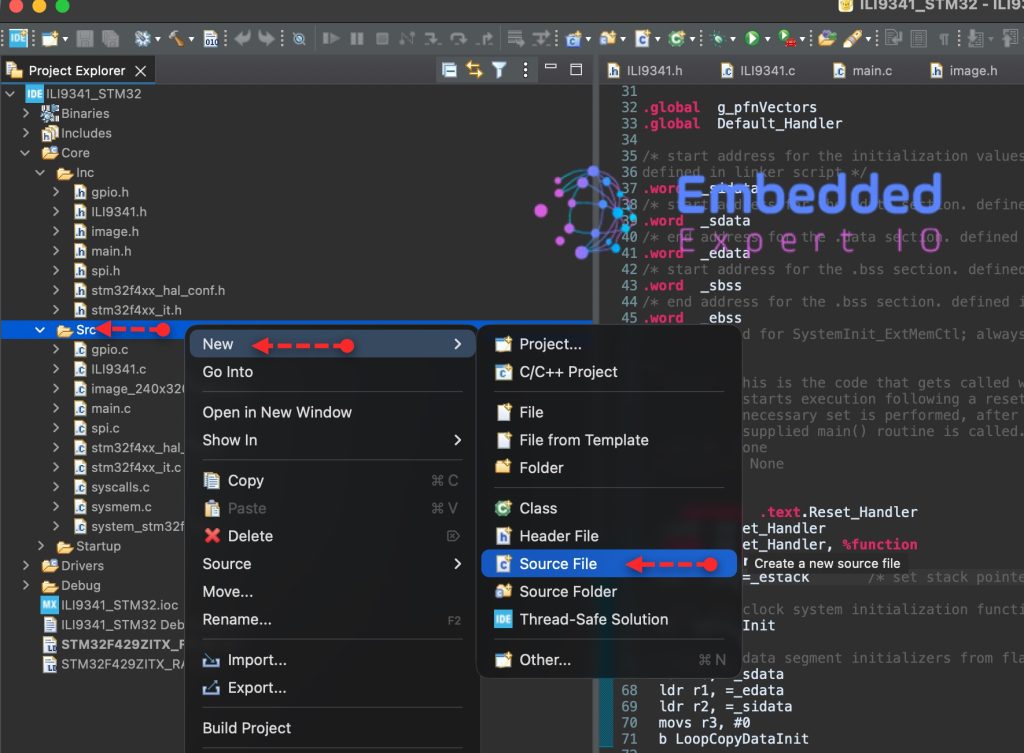
To create Source file, right click on Src folder and add new source file as following:
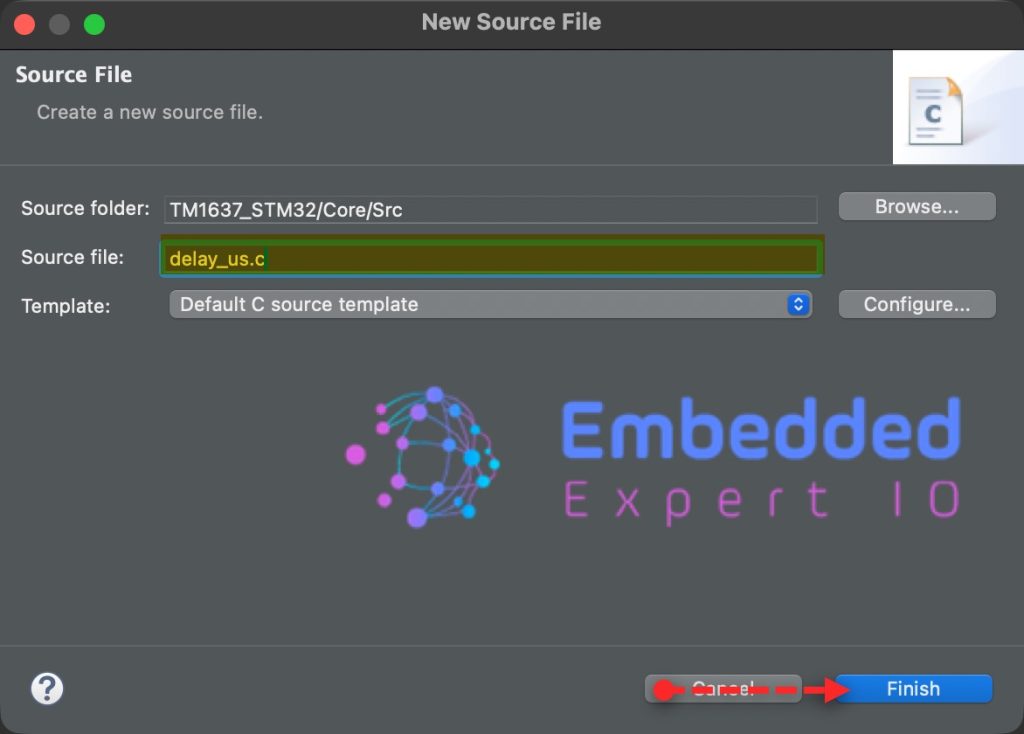
Give a name for the source file, we shall name it as delay_us.c as following:
In similar manner, right click on Inc folder and add new header file with name of delay_us.h as follows:

Open delay_us.h header file. We start by including the following:
#include "tim.h" #include "stdint.h"
Next, declare the following two functions:
void delay_us_start(void); void delay_us(uint32_t us);
That all for the header file.
Next, open delay_us.c source file. Include the following header file as follows:
#include "delay_us.h"
Next, the functions:
void delay_us_start(void)
{
HAL_TIM_Base_Start(&htim2);
}
void delay_us(uint32_t us)
{
__HAL_TIM_SET_COUNTER(&htim2,0); // set the counter value a 0
while ((uint32_t)__HAL_TIM_GET_COUNTER(&htim2) < us); // wait for the counter to reach the us input in the p
}
For more details how these functions have been developed, please refer to this guide.
6. Developing TM1637 Firmware:
First, we need to create new source and header files.
To create Source file, right click on Src folder and add new source file as following:
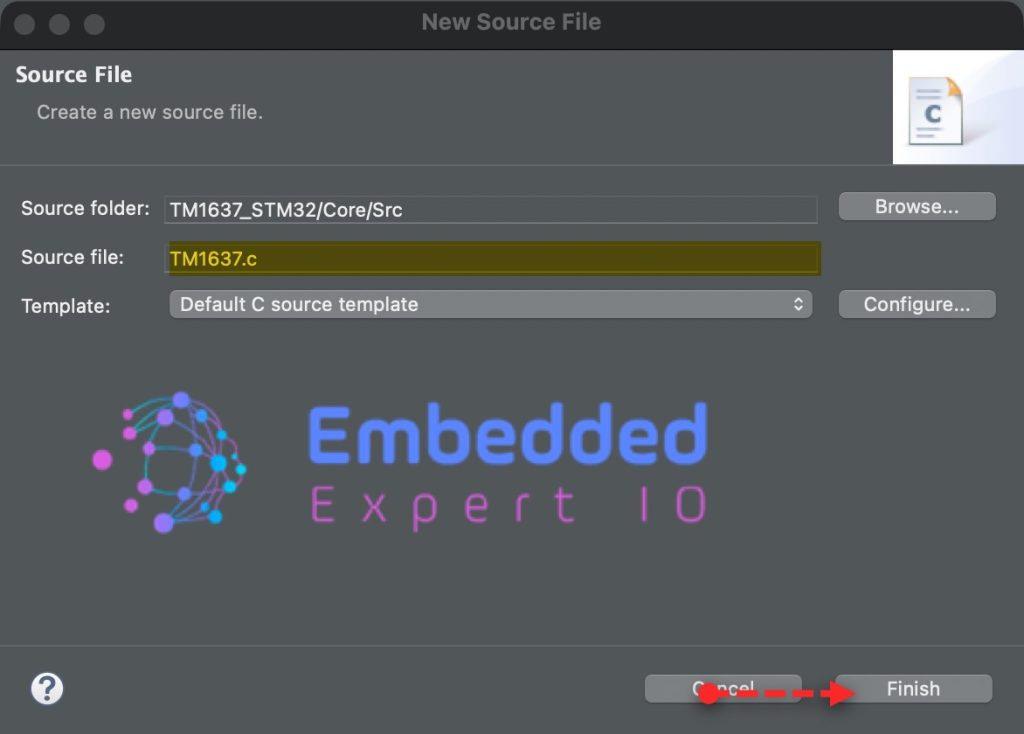
Give a name for the source file, we shall name it as TM1637.c as following:
In similar manner, right click on Inc folder and add new header file with name of TM1637.h as follows:
In the header file, we start by including the following header files:
#include "main.h" #include "gpio.h" #include "delay_us.h"
Next, declare the following function:
void tm1637Init(void);
It is a one-time configuration step that prepares the TM1637 to accept single-digit (fixed-address) writes.
Next,
void tm1637SetDigit(uint8_t position, uint8_t value, uint8_t dot);
This is a function prototype that declares a function used to update one digit on a 4-digit TM1637 display.
position(0–3): selects which digit to updatevalue(0–15): selects the segment pattern (0–9, A–F)dot(0 or 1): turns the decimal point on or off
Next,
void tm1637SetBrightness(char brightness);
This function manages the internal Pulse Width Modulation (PWM) of the TM1637 chip to control how much current flows through the LEDs.
Last function:
void tm1637SetColon(uint8_t state);
This is a function prototype used to control the colon (:) indicator on a TM1637 clock-style display.
Thats all for the header file.
Next, open TM1637.c source file.
We start by including the following header file:
#include "TM1637.h"
First, declare a buffer to hold the digit to be displayed as follows:
uint8_t displayBuffer[4]={0};Then, declare segment map as follows:
const char segmentMap[] = {
0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, // 0-7
0x7f, 0x6f, 0x77, 0x7c, 0x39, 0x5e, 0x79, 0x71, // 8-9, A-F
0x00
};Next, declare macros to handle the state of CLK and DIO pins as follows:
#define _tm1637ClkHigh() HAL_GPIO_WritePin(CLK_GPIO_Port,CLK_Pin,GPIO_PIN_SET); #define _tm1637ClkLow() HAL_GPIO_WritePin(CLK_GPIO_Port,CLK_Pin,GPIO_PIN_RESET); #define _tm1637DioHigh() HAL_GPIO_WritePin(DIO_GPIO_Port,DIO_Pin,GPIO_PIN_SET); #define _tm1637DioLow() HAL_GPIO_WritePin(DIO_GPIO_Port,DIO_Pin,GPIO_PIN_RESET);
Since my module has time separator rather than decimal points, I defined the following statement to handle this:
#define COLON_POS 1 // or 2 depending on your module
Next, declare the function to handle the delay in uS for the module as follows:
static void _tm1637DelayUsec(unsigned int i)
{
delay_us(i);
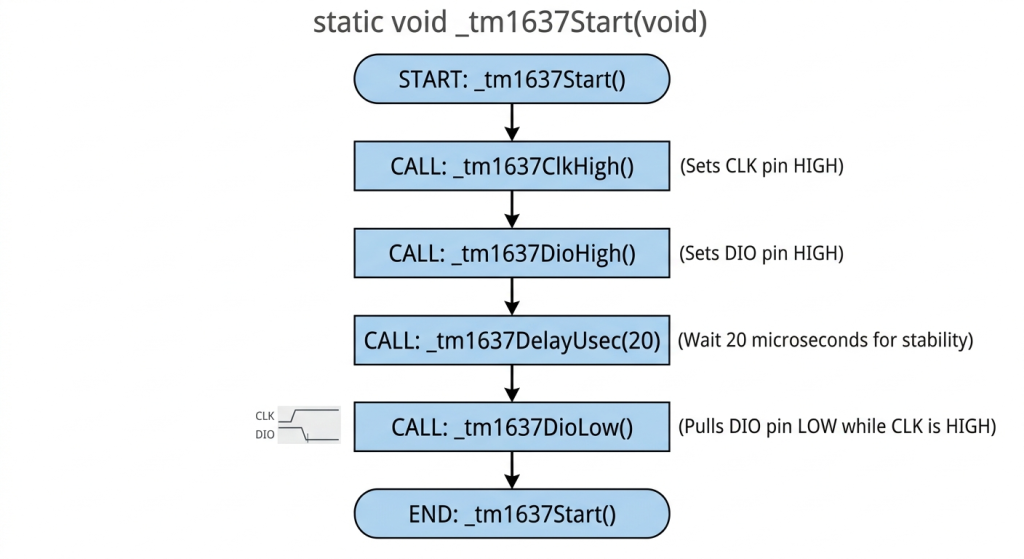
}Next, for start condition:
static void _tm1637Start(void)
{
_tm1637ClkHigh();
_tm1637DioHigh();
_tm1637DelayUsec(20);
_tm1637DioLow();
}
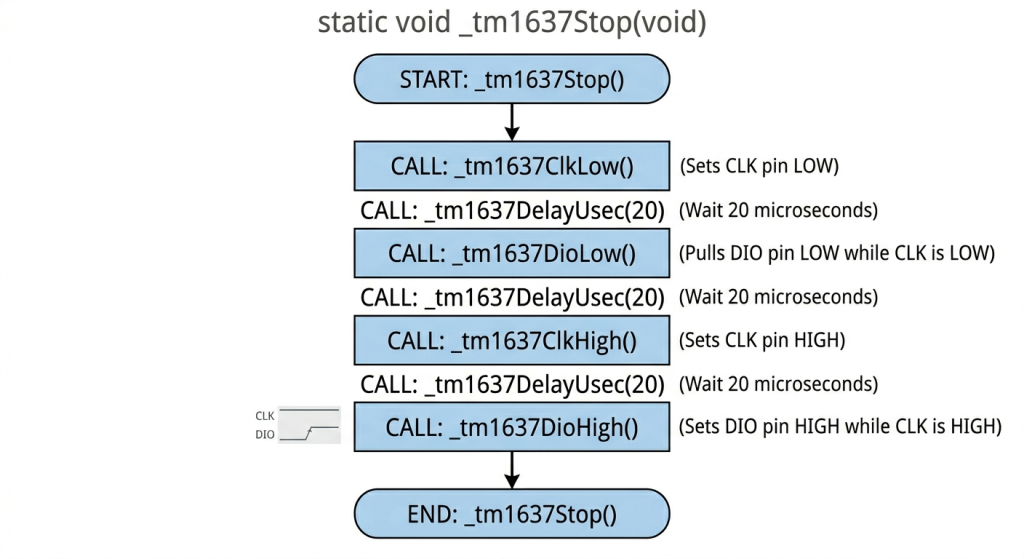
Next, stop condition:
static void _tm1637Stop(void)
{
_tm1637ClkLow();
_tm1637DelayUsec(20);
_tm1637DioLow();
_tm1637DelayUsec(20);
_tm1637ClkHigh();
_tm1637DelayUsec(20);
_tm1637DioHigh();
}
Next, reading the results:
static void _tm1637ReadResult(void)
{
_tm1637ClkLow();
_tm1637DelayUsec(50);
// while (dio); // We're cheating here and not actually reading back the response.
_tm1637ClkHigh();
_tm1637DelayUsec(20);
_tm1637ClkLow();
}This is just to follow the requirement and wast a little bit of time.
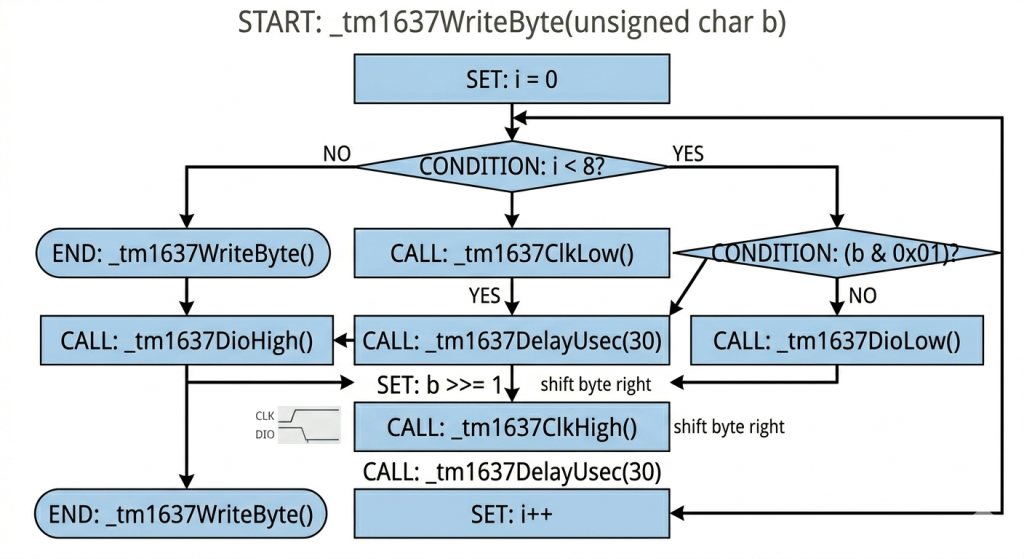
Next, write single byte to the module:
static void _tm1637WriteByte(unsigned char b)
{
for (int i = 0; i < 8; ++i) {
_tm1637ClkLow();
if (b & 0x01) {
_tm1637DioHigh();
}
else {
_tm1637DioLow();
}
_tm1637DelayUsec(30);
b >>= 1;
_tm1637ClkHigh();
_tm1637DelayUsec(30);
}
}
Next, for the initialization of the module:
void tm1637Init(void)
{
_tm1637Start();
_tm1637WriteByte(0x44); // fixed address mode
_tm1637ReadResult();
_tm1637Stop();
}
Next, write to a digit:
void tm1637SetDigit(uint8_t position, uint8_t value, uint8_t dot)
{
if (position > 3 || value > 15) return;
uint8_t seg = segmentMap[value];
if (dot)
seg |= 0x80;
displayBuffer[position] = seg;
// Write single digit
_tm1637Start();
_tm1637WriteByte(0xC0 | position);
_tm1637ReadResult();
_tm1637WriteByte(seg);
_tm1637ReadResult();
_tm1637Stop();
}Set the brightness:
void tm1637SetBrightness(char brightness)
{
// Brightness command:
// 1000 0XXX = display off
// 1000 1BBB = display on, brightness 0-7
// X = don't care
// B = brightness
_tm1637Start();
_tm1637WriteByte(0x87 + brightness);
_tm1637ReadResult();
_tm1637Stop();
}This function for displaying the separator as follows:
void tm1637SetColon(uint8_t state)
{
if (state)
displayBuffer[COLON_POS] |= 0x80;
else
displayBuffer[COLON_POS] &= ~0x80;
// Rewrite only that digit
_tm1637Start();
_tm1637WriteByte(0xC0 | COLON_POS);
_tm1637ReadResult();
_tm1637WriteByte(displayBuffer[COLON_POS]);
_tm1637ReadResult();
_tm1637Stop();
}This function will maintain the current value and update the separator only.
Thats all for the firmware.
7. Main.c Code:
Open main.c.
In user code includes, include the following header files:
#include "TM1637.h" #include "delay_us.h"
In user code begin PV, declare the following variables to display the time:
uint8_t hours = 12; uint8_t minutes = 0; uint8_t colonState = 0; uint32_t lastTick = 0;
In user code begin 0:
void updateDisplay(void)
{
tm1637SetDigit(0, hours / 10, 0);
tm1637SetDigit(1, hours % 10, colonState); // separator here
tm1637SetDigit(2, minutes / 10, 0);
tm1637SetDigit(3, minutes % 10, 0);
}In user code begin 2, start the microsecond timer as follows:
delay_us_start();
Initialize the display:
tm1637Init();
Set the brightness:
tm1637SetBrightness(5);
In user code begin 3 in while 1 loop:
if (HAL_GetTick() - lastTick >= 1000)
{
lastTick = HAL_GetTick();
// Toggle colon
colonState ^= 1;
// Increment time
minutes++;
if (minutes >= 60)
{
minutes = 0;
hours++;
if (hours >= 24)
hours = 0;
}
updateDisplay();
}Thats all for the guide.
Save, build the project and run it as follows:

You may download the code below:
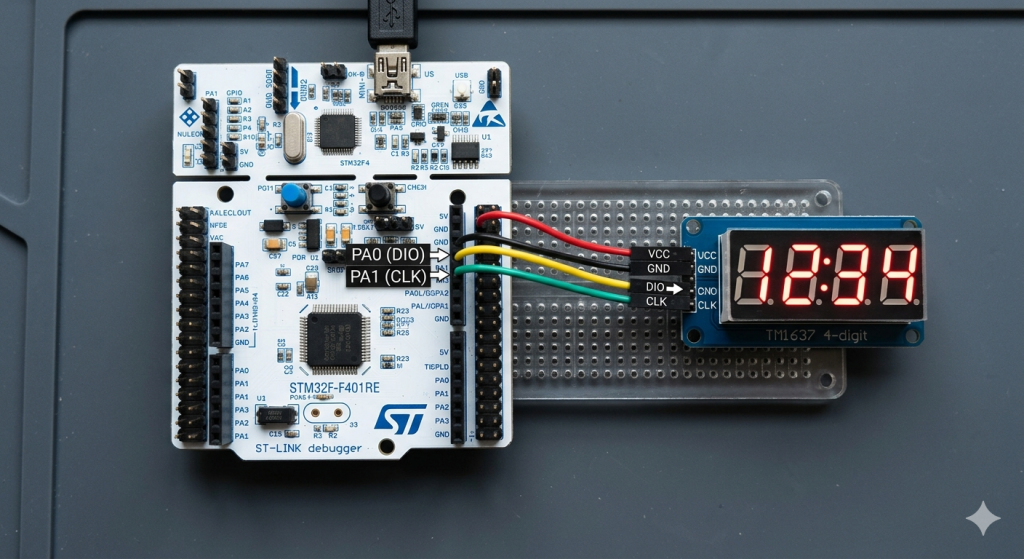
8. Results:
You should get the following:
Please note that in the demo, I am increasing the minutes each second for the demo purposes.
Happy coding 😉
Add Comment