In Part 2, we dive into the core firmware development by establishing $I^2C$ communication to read the factory-calibrated coefficients and raw data from the BMP180 sensor. You will learn how to implement the datasheet’s specific compensation algorithms to accurately calculate and stream real-time temperature and pressure values via UART.
In this guide, we shall cover the following:
- Firmware Development.
- Results.
1. Firmware Development.
We start first by creating new source and header files with name of BMP180.c and BMP180.h respectively.
Open BMP180.h header file.
First, the sensor has sampling time per the datasheet as shown below:
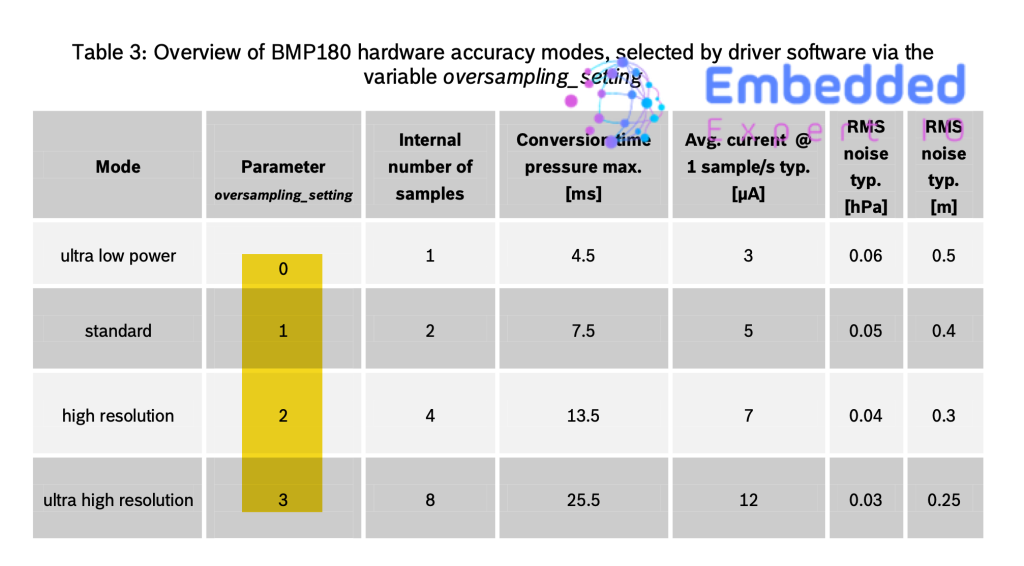
We need to define these values in the header, we can use enumeration to do that as follows:
typedef enum
{
OSS0=0,
OSS1=1,
OSS2=2,
OSS3=3
}OSS;Next, we define the function to initialize the sensor as follows:
void BMP180_init();
Next, a function that updates the sensor data as follows:
void update_BMP180(OSS OSS);
The function takes oversampling a parameter.
Finally, function that should return the measured temperature and pressure as follows:
float get_temperature(void); float get_pressure(void);
Hence, the entire header file as follows:
#ifndef INC_BMP180_H_
#define INC_BMP180_H_
typedef enum
{
OSS0=0,
OSS1=1,
OSS2=2,
OSS3=3
}OSS;
void BMP180_init();
void update_BMP180(OSS OSS);
float get_temperature(void);
float get_pressure(void);
#endifNext, open BMP180.c source file.
In the source file, we shall start by including the following header files:
#include "BMP180.h" #include "i2c.h" #include "math.h"
Next, we define the address of the sensor.
From the datasheet of the sensor, we can find the address is 0x77 as follows:
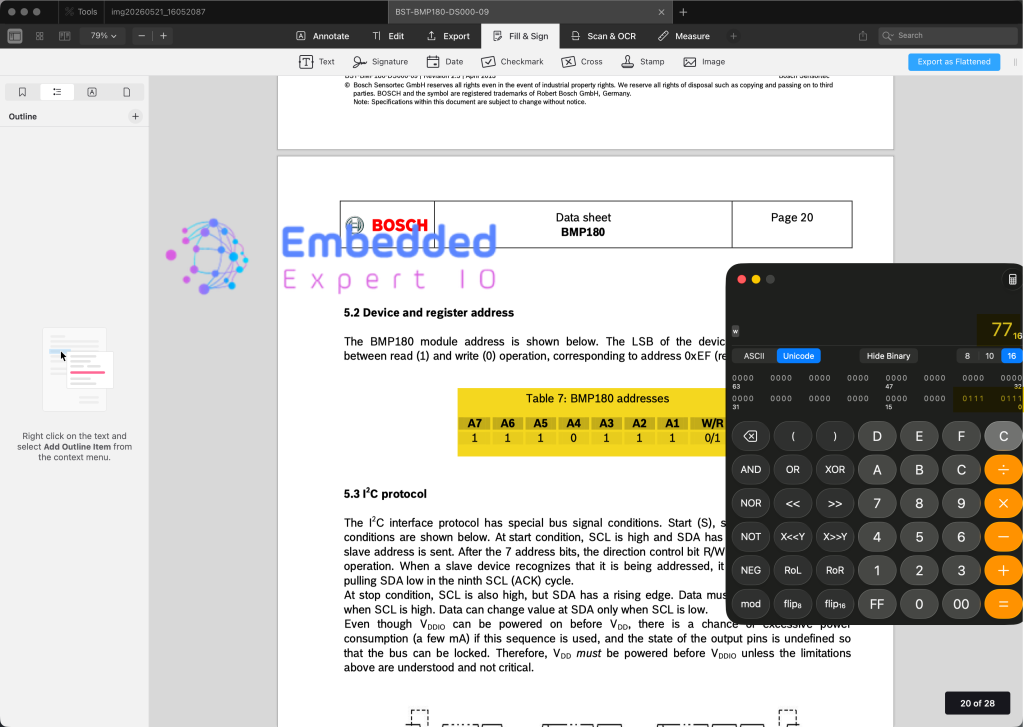
Hence, we can define as follows:
#define BMP_180_add 0x77<<1
We shift to left by 1 to handle read/write operation by the i2c library.
Next, variable to store the calibration variables as follows:
short AC1,AC2,AC3,B1,B2,MB,MC,MD; unsigned short AC4,AC5,AC6;
Declare a buffer of 22 bytes to store the calibration data as follows:
uint8_t eeprom_data[22];
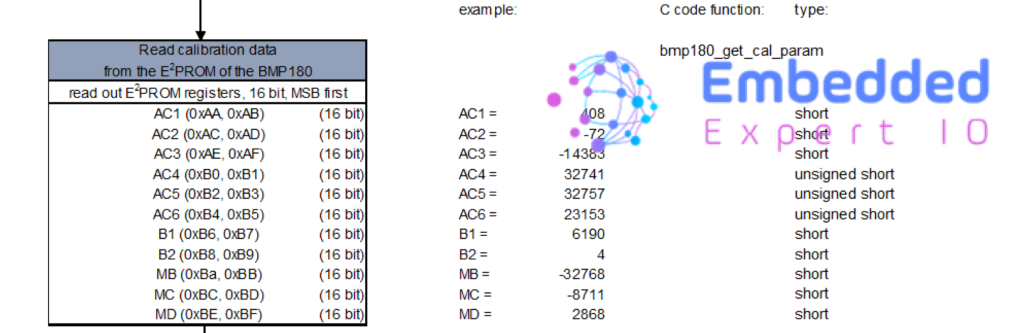
Next, define the address of the calibration values that stored in the EEPROM of BMP180:
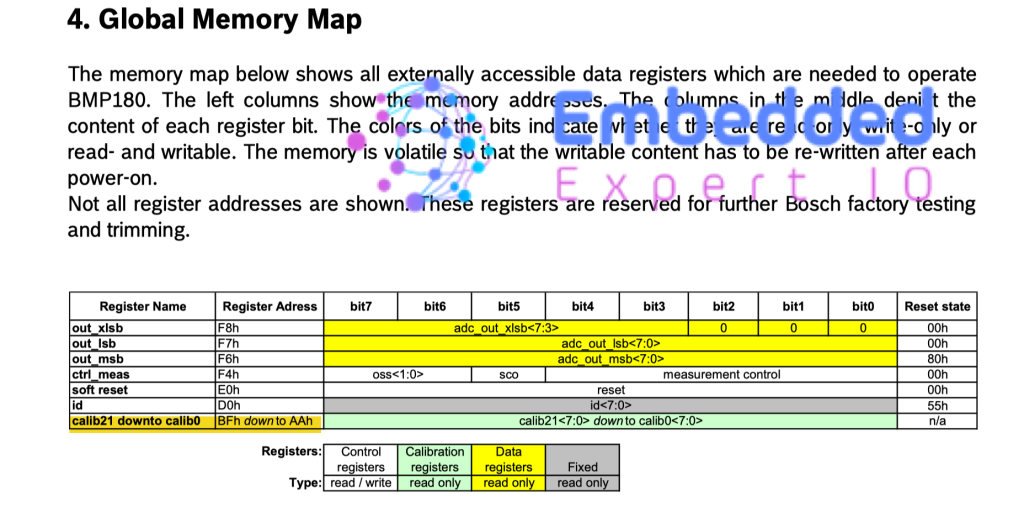
#define EEPROM_St_add 0xAA
Next, declare buffers to store the incoming bytes from the sensor and uncompensated pressure and temperature values as follows:
long UT,UP; uint8_t data_tem[2],data_pres[3];
Next, variable to handle the calculation of the temperature and humidity as follows:
long X1 = 0; long X2 = 0; long X3 = 0; long B3 = 0; long B5 = 0; unsigned long B4 = 0; long B6 = 0; unsigned long B7 = 0; long Press = 0;
Next, declare a data structure to hold temperature and pressure values as follows:
typedef struct
{
float temperature;
float pressure;
}BMP180Sensor_t;
BMP180Sensor_t BMP180;Next, for sensor initialization, all we need is to read the calibration data as follows:
void BMP180_init(void)
{
HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,EEPROM_St_add,1,eeprom_data,22,10);
AC1=(eeprom_data[0]<<8)+eeprom_data[1];
AC2=(eeprom_data[2]<<8)+eeprom_data[3];
AC3=(eeprom_data[4]<<8)+eeprom_data[5];
AC4=(eeprom_data[6]<<8)+eeprom_data[7];
AC5=(eeprom_data[8]<<8)+eeprom_data[9];
AC6=(eeprom_data[10]<<8)+eeprom_data[11];
B1=(eeprom_data[12]<<8)+eeprom_data[13];
B2=(eeprom_data[14]<<8)+eeprom_data[15];
MB=(eeprom_data[16]<<8)+eeprom_data[17];
MC=(eeprom_data[18]<<8)+eeprom_data[19];
MD=(eeprom_data[20]<<8)+eeprom_data[21];
}Next, for update the sensor data:
void update_BMP180(OSS OSS)
To read the uncompensated temperature value:
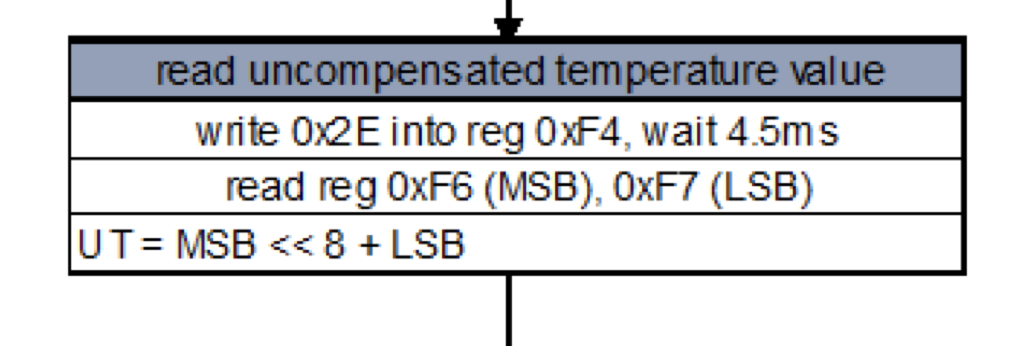
uint8_t datatowrite = 0x2E; HAL_I2C_Mem_Write(&hi2c1,BMP_180_add,0xF4,1,&datatowrite,1,10); HAL_Delay(5); HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,0xF6,1,data_tem,2,10); UT=(data_tem[0]<<8)+data_tem[1];
Next, get the over sampling value passed by the user as follows:
uint8_t oss;
switch (OSS)
{
case OSS0: oss=0; break;
case OSS1: oss=1; break;
case OSS2: oss=2; break;
case OSS3: oss=3; break;
default : oss=0; break;
}Next, to read the uncompensated pressure value:
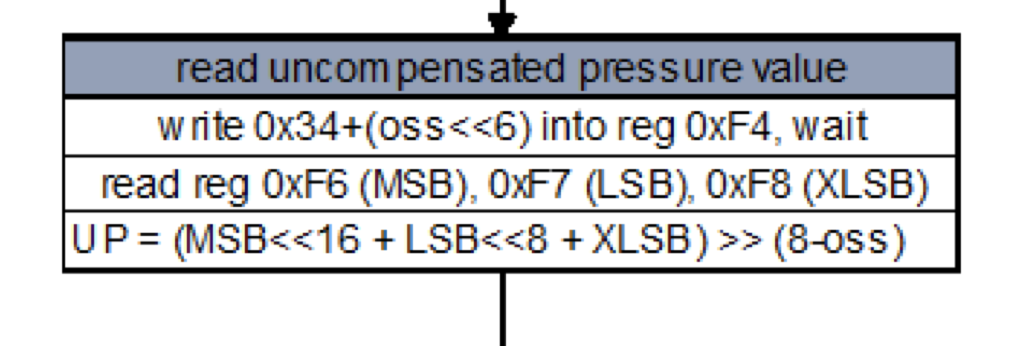
datatowrite=0x34+(oss<<6);
HAL_I2C_Mem_Write(&hi2c1,BMP_180_add,0xF4,1,&datatowrite,1,10);
switch (OSS)
{
case OSS0: HAL_Delay(5); break;
case OSS1: HAL_Delay(8); break;
case OSS2: HAL_Delay(14); break;
case OSS3: HAL_Delay(26); break;
default : HAL_Delay(5); break;
}
HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,0xF6,1,data_pres,3,10);
UP=((data_pres[0]<<16)+(data_pres[1]<<8)+(data_pres[2]))>>(8-oss);Now, according to the datasheet, the calculation as follows:
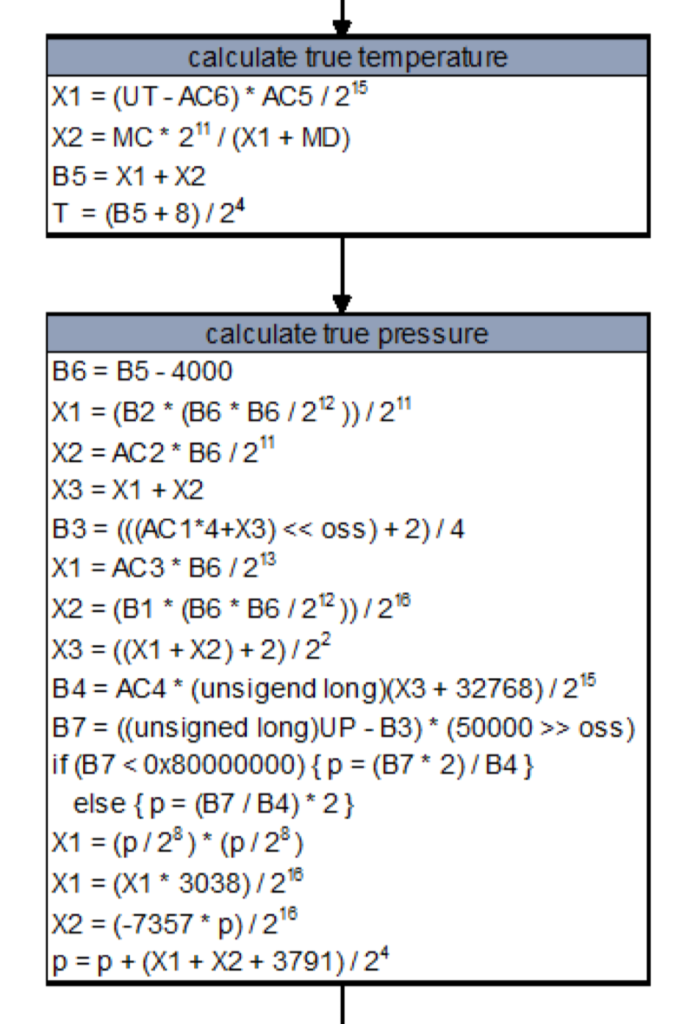
Hence, the calculation as follows:
//calculate temperature
long x1=((UT-AC6) * (AC5/(pow(2,15))));
long x2= ((MC)*(pow(2,11)))/(x1+MD);
long B5= (x1+x2);
BMP180.temperature= ((B5+8)/(pow(2,4)))/10;
//calculate pressure
B6 = B5-4000;
X1 = (B2 * (B6*B6/(pow(2,12))))/(pow(2,11));
X2 = AC2*B6/(pow(2,11));
X3 = X1+X2;
B3 = (((AC1*4+X3)<<oss)+2)/4;
X1 = AC3*B6/pow(2,13);
X2 = (B1 * (B6*B6/(pow(2,12))))/(pow(2,16));
X3 = ((X1+X2)+2)/pow(2,2);
B4 = AC4*((unsigned long)(X3+32768))/(pow(2,15));
B7 = ((unsigned long)UP-B3)*(50000>>oss);
if (B7<0x80000000) {Press = (B7*2)/B4;}
else {Press = (B7/B4)*2;}
X1 = (Press/(pow(2,8)))*(Press/(pow(2,8)));
X1 = (X1*3038)/(pow(2,16));
X2 = (-7357*Press)/(pow(2,16));
Press = Press + (X1+X2+3791)/(pow(2,4));
BMP180.pressure = Press;Finally, the functions that return the temperature and pressure as follows:
float get_temperature(void)
{
return BMP180.temperature;
}
float get_pressure(void)
{
return BMP180.pressure;
}Hence, the entire BMP180.c source file:
#include "BMP180.h"
#include "i2c.h"
#include "math.h"
#define BMP_180_add 0x77<<1
#define EEPROM_St_add 0xAA
uint8_t eeprom_data[22];
short AC1,AC2,AC3,B1,B2,MB,MC,MD;
unsigned short AC4,AC5,AC6;
long UT,UP;
uint8_t data_tem[2],data_pres[3];
long X1 = 0;
long X2 = 0;
long X3 = 0;
long B3 = 0;
long B5 = 0;
unsigned long B4 = 0;
long B6 = 0;
unsigned long B7 = 0;
long Press = 0;
typedef struct
{
float temperature;
float pressure;
}BMP180Sensor_t;
BMP180Sensor_t BMP180;
void BMP180_init(void)
{
HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,EEPROM_St_add,1,eeprom_data,22,10);
AC1=(eeprom_data[0]<<8)+eeprom_data[1];
AC2=(eeprom_data[2]<<8)+eeprom_data[3];
AC3=(eeprom_data[4]<<8)+eeprom_data[5];
AC4=(eeprom_data[6]<<8)+eeprom_data[7];
AC5=(eeprom_data[8]<<8)+eeprom_data[9];
AC6=(eeprom_data[10]<<8)+eeprom_data[11];
B1=(eeprom_data[12]<<8)+eeprom_data[13];
B2=(eeprom_data[14]<<8)+eeprom_data[15];
MB=(eeprom_data[16]<<8)+eeprom_data[17];
MC=(eeprom_data[18]<<8)+eeprom_data[19];
MD=(eeprom_data[20]<<8)+eeprom_data[21];
}
void update_BMP180(OSS OSS)
{
uint8_t datatowrite = 0x2E;
HAL_I2C_Mem_Write(&hi2c1,BMP_180_add,0xF4,1,&datatowrite,1,10);
HAL_Delay(5);
HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,0xF6,1,data_tem,2,10);
UT=(data_tem[0]<<8)+data_tem[1];
uint8_t oss;
switch (OSS)
{
case OSS0: oss=0; break;
case OSS1: oss=1; break;
case OSS2: oss=2; break;
case OSS3: oss=3; break;
default : oss=0; break;
}
datatowrite=0x34+(oss<<6);
HAL_I2C_Mem_Write(&hi2c1,BMP_180_add,0xF4,1,&datatowrite,1,10);
switch (OSS)
{
case OSS0: HAL_Delay(5); break;
case OSS1: HAL_Delay(8); break;
case OSS2: HAL_Delay(14); break;
case OSS3: HAL_Delay(26); break;
default : HAL_Delay(5); break;
}
HAL_I2C_Mem_Read(&hi2c1,BMP_180_add,0xF6,1,data_pres,3,10);
UP=((data_pres[0]<<16)+(data_pres[1]<<8)+(data_pres[2]))>>(8-oss);
//calculate temperature
long x1=((UT-AC6) * (AC5/(pow(2,15))));
long x2= ((MC)*(pow(2,11)))/(x1+MD);
long B5= (x1+x2);
BMP180.temperature= ((B5+8)/(pow(2,4)))/10;
//calculate pressure
B6 = B5-4000;
X1 = (B2 * (B6*B6/(pow(2,12))))/(pow(2,11));
X2 = AC2*B6/(pow(2,11));
X3 = X1+X2;
B3 = (((AC1*4+X3)<<oss)+2)/4;
X1 = AC3*B6/pow(2,13);
X2 = (B1 * (B6*B6/(pow(2,12))))/(pow(2,16));
X3 = ((X1+X2)+2)/pow(2,2);
B4 = AC4*((unsigned long)(X3+32768))/(pow(2,15));
B7 = ((unsigned long)UP-B3)*(50000>>oss);
if (B7<0x80000000) {Press = (B7*2)/B4;}
else {Press = (B7/B4)*2;}
X1 = (Press/(pow(2,8)))*(Press/(pow(2,8)));
X1 = (X1*3038)/(pow(2,16));
X2 = (-7357*Press)/(pow(2,16));
Press = Press + (X1+X2+3791)/(pow(2,4));
BMP180.pressure = Press;
}
float get_temperature(void)
{
return BMP180.temperature;
}
float get_pressure(void)
{
return BMP180.pressure;
}Next, open main.c source file.
We start by including the bmp180 header file as follows:
#include "BMP180.h"
In user code begin PV, declare temperature and pressure variables:
float pressure, temperature;
In user code begin 2 in main function, initialize the sensor:
BMP180_init();
In while 1 loop, in user code begin 3:
- Update the sensor.
- Get the temperature and pressure.
- Print the temperature and pressure.
- Wait for 200ms between each reading.
update_BMP180(OSS3);
temperature=get_temperature();
pressure=get_pressure();
printf("Temperature = %0.4f and Pressure =%0.4f\r\n",temperature,pressure);
HAL_Delay(200);Thats all for the firmware.
Save, build the project and run it as follows:

You may download the project from here.
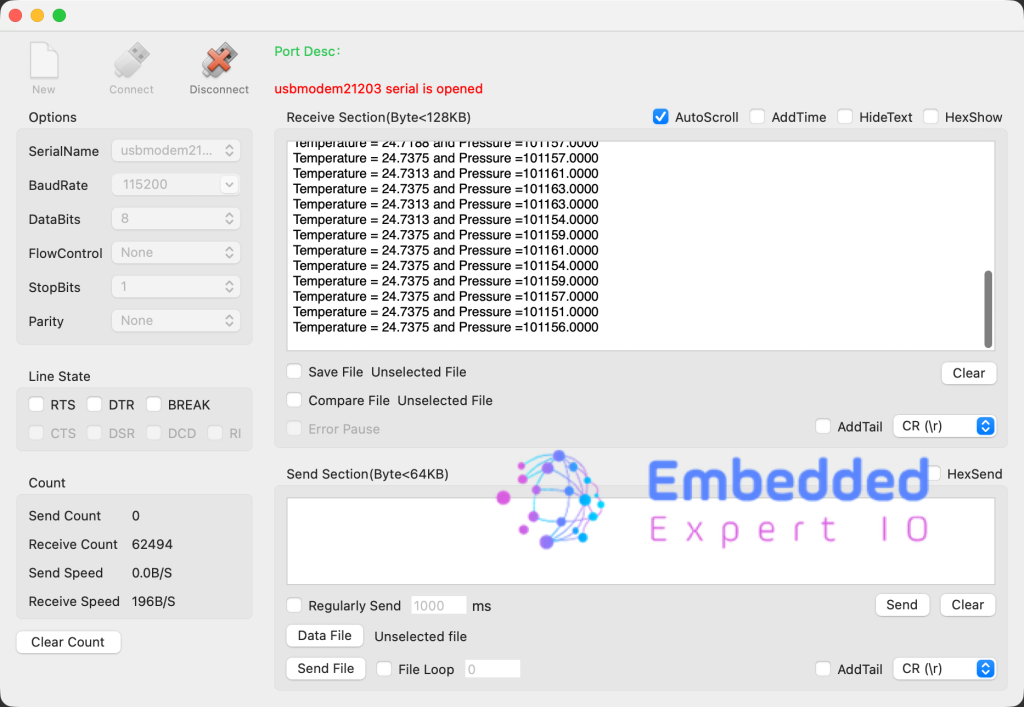
2. Results:
Open your terminal application, set the baudrate to 115200 and you should get the following:
Happy coding 😉
Add Comment